Download
1 / 21
220 likes | 383 Views
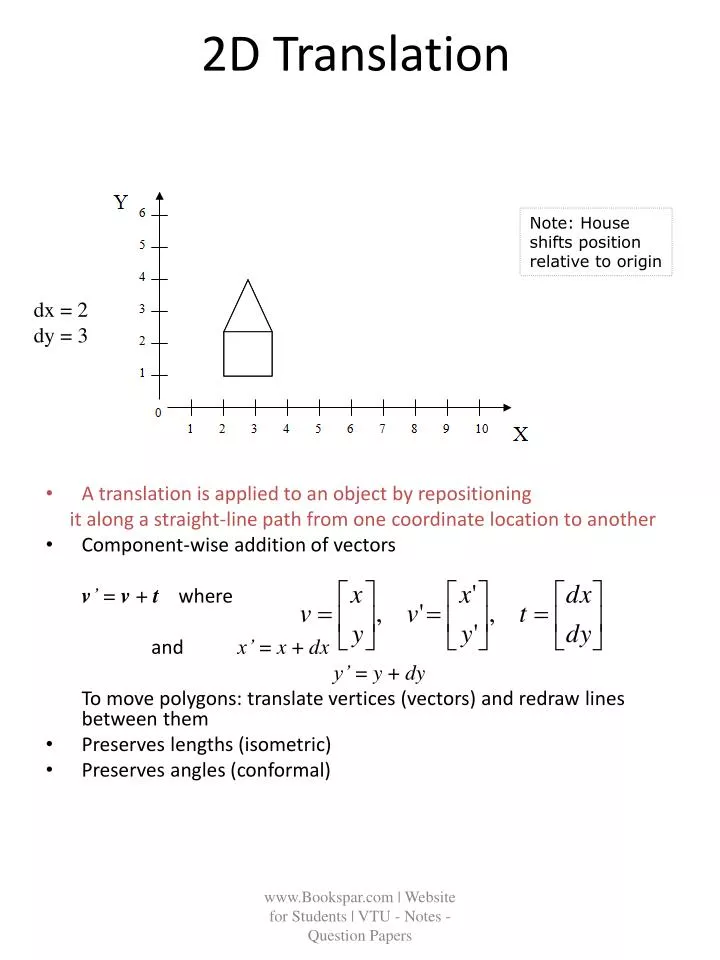
6. 5. 4. Y. 3. 2. 1. dx = 2 dy = 3. 0. 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. X. 2D Translation. Note: House shifts position relative to origin. A translation is applied to an object by repositioning

E N D
6 5 4 Y 3 2 1 dx = 2 dy = 3 0 1 2 3 4 5 6 7 8 9 10 X 2D Translation Note: House shifts position relative to origin • A translation is applied to an object by repositioning it along a straight-line path from one coordinate location to another • Component-wise addition of vectors v’ = v + t where and x’ = x + dx y’ = y + dy To move polygons: translate vertices (vectors) and redraw lines between them • Preserves lengths (isometric) • Preserves angles (conformal) www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
2D Translation • Rigid body transformation • Polygons are translated by adding the translation vector to the coordinate position of each vertex and generating the polygon using the new set of vertex coordinates • For circle and ellipse, translate the center coordinates and redraw the object in the new location • Translate the curves by (say, splines) displacing the coordinate positions defining the objects and redraw using translated points www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
6 5 4 Y 3 2 1 0 1 2 3 4 5 6 7 8 9 10 X 2D Scaling Note: House shifts position relative to origin • The scaling alters the size of an object • Component-wise scalar multiplication of vectors v’ = Sv where and • Does not preserve lengths • Does not preserve angles (except when scaling is uniform) www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
6 5 4 Y 3 2 1 0 1 2 3 4 5 6 7 8 9 10 X 2D Rotation • A 2D rotation is applied to an object by repositioning it along a circular path in the xy-plane • Rotation of vectors through an angle θ v’ = Rθv where and x’ = x cosθ – y sinθ y’ = x sinθ + y cosθ • Proof by double angle formula • Preserves lengths and angles Note: House shifts position relative to origin NB: A rotation by 0 angle, i.e. no rotation at all, gives us the identity matrix x = r cos (f + q) y = r sin (f + q) x = r cos f y = r sin f www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
6 5 4 Y 3 2 1 0 1 2 3 4 5 6 7 8 9 10 X Rotation about fixed points www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
2D Rotation • Rigid body transformation • Every point on the object is rotated with the same angle • Straight line segment is rotated by applying the rotation equations to line end points and redrawing with new end points • Polygons are rotated by displacing each vertex through the specified rotation angle and regenerating the polygon using new vertices • Curved lines are rotated by repositioning the defining points and redrawing the curves • Circle can be rotated about a non central axis by moving the center position through the arc that subtends the specified rotation angle • Ellipse can be rotated about its center coordinates by rotating the major and minor axes www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
2D Rotation and Scale are Relative to Origin • Suppose object is not centered at origin • Solution: move to the origin, scale and/or rotate, then move it back. • Would like to compose successive transformations…
Reflection • Reflection produces a mirror image of an • object • Mirror image for a 2D reflection is generated relative to an axis of reflection by rotating the object 180 degrees • corresponds to negative scale factors original sx = -1 sy = 1 sx = -1 sy = -1 sx = 1 sy = -1 www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
Shear distorts the shape • Helpful to add one more basic transformation • Equivalent to pulling faces in opposite directions Shear Consider simple shear along x axis x’ = x + y cot q y’ = y z’ = z H(q) =
Homogenous Coordinates translation: scale: rotation: v’ = v + t v’ = Sv v’ = Rv • Translation, scaling and rotation are expressed (non-homogeneously) as: • Composition is difficult to express • Translation is not expressed as a matrix multiplication • Homogeneous coordinates allows expression of all three as 3x3 matrices for easy composition • w is 1 for affine transformations www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
W Ph (x,y,w) 1 P2d (x/w,y/w,1) X Y What is ? • P2d is intersection of line determined by Ph with the w = 1 plane • Infinite number of points correspond to (x, y, 1) : they constitute the whole line (tx, ty, tw) www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
2D Homogeneous CoordinateTransformations • For points written in homogeneous coordinates, translation, scaling and rotation relative to the origin are expressed homogeneously as: www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
2D Homogeneous Coordinate Transformations • Consider the rotation matrix: • The 2 x 2 submatrix columns are: • unit vectors (length=1) • perpendicular (dot product=0) • vectors into which X-axis and Y-axis rotate (are images of x and y unit vectors) • The 2 x 2 submatrix rows are: • unit vectors • perpendicular • rotate into X-axis and Y-axis (are pre-images of x and y unit vectors) • Preserves lengths and angles of original geometry. Therefore, matrix is a “rigid body” transformation www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
Examples • Translate [1,3] by [7,9] • Scale [2,3] by 5 in the x direction and 10 in the Y direction • Rotate [2,2] by 90° www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
Matrix Compositions: Using Translation • Avoiding unwanted translation when scaling or rotating an object not centered at origin: • translate object to origin, perform scale or rotate, translate back. • How would you scale the house by 2 in “its” y and rotate it through 90°? • Remember: matrix multiplication is not commutative! Hence order matters www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
6 6 5 5 4 4 Y Y 3 3 2 2 1 1 0 0 1 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 10 10 X X Transformations are NOT Commutative Translation → Rotation Rotation → Translation www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
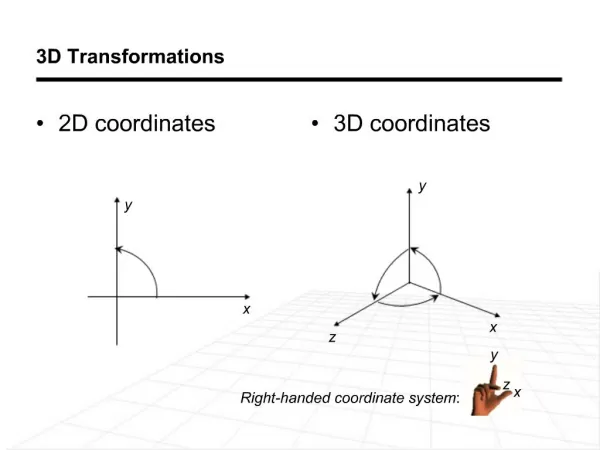
y x z 3D Basic Transformations (right-handed coordinate system) • Translation • Scaling www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
3D Basic Transformations (right-handed coordinate system) • Rotation about X-axis • For rotation about x axis, x is unchanged • Rotation about Y-axis • For rotation about y axis, y is unchanged • Rotation about Z-axis • Rotation about z axis in three dimensions leaves all • points with the same z • Equivalent to rotation in two dimensions in planes of • constant z www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
Inverses of (2D and) 3D Transformations • Translation: • Scaling: • Rotation: • Shear: www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
References • Edward Angel –Interactive Computer Graphics • Hearn and Baker - Computer Graphics • James D. Foley - Computer Graphics: principles and practice • Asthana and Sinha- Computer Graphics • PPTs: Von Dom, Bing-Yu Chen www.Bookspar.com | Website for Students | VTU - Notes - Question Papers
THANK YOU www.Bookspar.com | Website for Students | VTU - Notes - Question Papers