Download
1 / 11
110 likes | 202 Views
Long Range Vehicle Control (Super Tank). Jason Holmes Matt Wickesberg Matt Guenette Michael Piercy. Project Overview. “Battery Powered” “Remote Controlled” “Super Tank” Tank to be controlled wirelessly over the internet Major constraints: Power, real-time video. PSSC.

E N D
Long Range Vehicle Control (Super Tank) Jason Holmes Matt Wickesberg Matt Guenette Michael Piercy
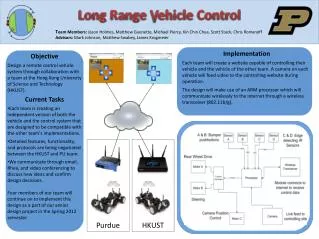
Project Overview • “Battery Powered” • “Remote Controlled” • “Super Tank” • Tank to be controlled wirelessly over the internet • Major constraints: Power, real-time video
PSSC • An ability to send/receive/decode commands from a controller wirelessly • An ability to control direction/firing capability of a vehicle • An ability to autonomously avoid obstacles encountered by the tank • An ability to provide sensor feedback to a wireless controller • An ability to monitor a battery and prevent signal disconnection due to power loss.
Controller 1 Controller 2 Controller N System Diagram Android Tablet – “Virtual” Controller Common LRVC Protocol Provides Services for Android Controller App. LRVC Server Common GUI Components Live Video Stream Specific Vehicle Protocols Feedback/Error Text Box FIRE Common GUI Components Vehicle 1 Vehicle 2 Vehicle M All communications (Vehicle and/or LRVC Protocols) are made with TCP off of a TCP/IP stack through WIFI.
Tank Diagram Fig. 1 – Vision Fig. 3 – Wall Detection Fig. 2 – Drop Off Detection Front Front Front Sensor Placement Back Back Back USB Camera Short Range IR Sensors Long Range IR Sensors attached to Stepper Motors For 180 degree rotation. Sensors
Computation Requirements • Obstacle avoidance algorithm • Stepper/IR coordination • IR voltage translation • Battery management algorithm • Real-time video transmission
Peripherals and GPIO • GPIO : • 8 (2 drive motors, 1 stepper, one firing) • Peripherals • 4 channels of 10 bit ATD (IR sensors) • 3 channels of PWM (Switching Regs., Stepper) • 1 channel UART (RS232 connection)
Microcontroller Choice STMicroelectronics STM32F103ZG • ARM 32-bit Cortex-M3 • 72MHz • 1MB Flash • 4 16-bit Timers with PWM • 2 I2C • 5 USART • 3 12-bit 16-ch A/D Converter • Plethora of GPIO