Download
1 / 20
220 likes | 548 Views
CONTROL SYSTEM. AN INTRODUCTION. Contents. 1. An Motion Control System 2. Purpose of Closed-Loop Control 3. Servo and Regulation Systems 4. Controller 5. How to Identify System 6. Summary. 1. An Motion System.

E N D
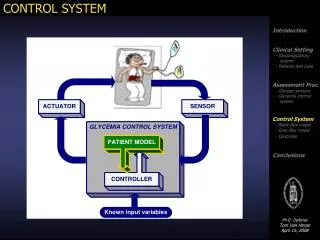
CONTROL SYSTEM AN INTRODUCTION
Contents • 1. An Motion Control System • 2. Purpose of Closed-Loop Control • 3. Servo and Regulation Systems • 4. Controller • 5. How to Identify System • 6. Summary
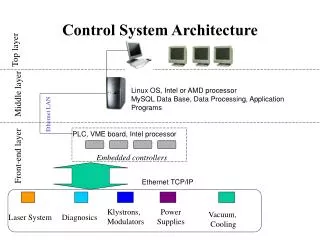
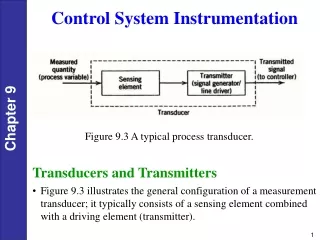
Plant: Input-output relationship (transfer function) may vary uncertainties (including time-varying) and Disturbances Nominal Model G(s)=5/(s+1) Actual Model G(s)=5.9/(s+1.3) Sensor: output may be digital or analog. Its input: real “speed”, its output: “readable data” of speed Actuator: Its input: “readable data” of the voltage of the power source. Its output: voltage, with needed current
Decision Making: Controller Analog Controller Digital Controller
2. Purposes • Open-loop: speed varies with the motor and load for a given drive voltage • Closed-loop: Compensates for the influence of the variations in the motor and the load (uncertainties and disturbances) on the speed.
3. Types of Systems • Servo Systems: the desired speed (set-point) changes fast. Major requirement: to follow the changing “set-point” at an acceptable speed and accuracy. • Regulation Systems: the desired speed does not changes very fast. It may be constant. Major concern: substantial uncertainties/disturbances and high accuracy.
4. Controller • What does a controller do? Decides how to respond to the observed difference between the measured speed and the desired speed set-point. • How should the controller respond? Primarily based on the model, which describes the relationship between the input (voltage) and the output(speed) Robust Control: also largely based on the uncertainties • An important Step in System Design: Find the model (system identification) • Design: compromise between the uncertainties /disturbance and the response speed.
5. How to Identify the System Analyze the input-output data pairs to fit the parameters in the used model (structure) How to analyze and how to generate the data pairs for analysis: System Identification
SYSTEM IDENTIFICATION INTRODUCTION
Contents • 1. System • 2. System Identification • 3. Importance • 4. Why Specific Techniques? • 5. Example • 6. Summary
1. System • System: an object in which variables of different kinds interact and produce observable signals • Control engineers’ views: • Process producing outputs from inputs • Outputs: • Inputs: manipulated to change the outputs • Disturbances:
2. System Identification • End products: empirical models of systems • Model: description of relationship among related variables • Theoretical Models: from first principles • Empirical models: • Observations of system variables • ==>Relationship among variables • ==> Models linking the variables
3. Importance • Control algorithms & system dynamics • First principles
6. Summary • Data Generation (Experiment Design) • Model Structure Determination • Parameters Estimation • Model Validation