Download
1 / 13
140 likes | 556 Views
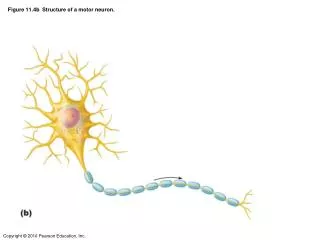
Structure of motor variability. Kyung Koh. Background. Motor variability A commonly seen features in human movements Bernstein “repetition without repetition” In the past, motor variability is thought to be the result of error.

E N D
Structure of motor variability Kyung Koh
Background • Motor variability • A commonly seen features in human movements • Bernstein “repetition without repetition” • In the past, motor variability is thought to be the result of error. • Scholz and Schöner (2002) developed the uncontrolled manifold analysis (UCM) • Variability which creates error • Variability which does not
F1 F2 Example – kinetic variable • Task : F1 + F2 = 10N(= a line equation [1D]) + error + error where
Example – kinetic variable F2 Task : F1 + F2 = 10N(= a line equation [1D]) • Good variability(which does not hurt performance) • Bad Variability (which does) • F1 + F2 = 10N 10N VGood VBad F1 10N
Uncontrolled Manifold Analysis (UCM) F2 • Task : F1 + F2 = 10N (= a line equation [1D]) • Variability in a UCM space (task irrelevant space) • Variability in an orthogonal to UCM space (task relevant space) 10N Basis vector for UCM space Basis vector for a subspace orthogonal to UCM F1 10N
Uncontrolled Manifold Analysis (UCM) F3 • Task : F1 + F2 + F3 = 10N(= a plane equation [2D]) • Variability in a UCM space (task irrelevant space) • Variability in an orthogonal to UCM space (task relevant space) 10N Basis vectors for UCM space 10N F2 Basis vector for orthogonal to UCM space 10N F1
motor synergy Uncontrolled Manifold Analysis (UCM) VS Principle Component Analysis (PCA) F2 • A linear transformation that transforms the data into a new coordinate system (NCS) • A method to measure variance of the data in NCS 10N PCA coordinates UCM coordinates F1 10N
Example – Kinematic variable Task : Target (Tx,Ty) By using jacobianMatraix, + error • + error • where • error
Motor Synergies • Motor Synergies in UCM • Ratio of Vucm and Vorthare commonly used to measure synergies
Summary There exists motor synergy Task-specific co-variation of effectors with the purpose to stabilize a performance variable (or minimize task error) (Latash 2002). The CNS uses all the available DOFs to generate families of equivalent solutions. • DOFs work together to achieve a goal by compensating for each errors. (Gelfand and Tsetlin 1967).
Benefits of having greater variability in UCM • Greater Variability in UCM space The system is redundant. • More DoFs than necessary to perform a particular task (e.g., F1 + F2 = 10N). • During walking on an uneven surface, DOFs at the foot create variety of configuration to maintain stability. • Extra DOFs allows a system to be more flexible (e.g. when get injured) 24 DoF 1 DoF