Download
1 / 36
510 likes | 945 Views
Introduction to estimation theory. Seoul Nat’l Univ. Contents. What is estimator for signal models estimator application Signal models Design objectives Options of estimators Objectives and design procedure Options for estimator : smoothing, filtering, and predicting FIR structure

E N D
Introduction to estimation theory Seoul Nat’l Univ.
Contents • What is estimator for signal models • estimator application • Signal models • Design objectives • Options of estimators • Objectives and design procedure • Options for estimator : smoothing, filtering, and predicting • FIR structure • Initial state dependency • Performance criterion • Extension to Control Seoul Nat’l Univ.
1.Introduction 1.1 What is estimator for signal models (1/1) Parameter estimation : Parameter estimator : State State estimation as small as possible Seoul Nat’l Univ.
1.Introduction 1.2 estimator application (1/3) • Other methodology • Fault detection • parameter estimation • state observer/estimation • signal separation • spectrum analysis • Output feedback control : state feedback control + estimator Seoul Nat’l Univ.
1.Introduction estimator 1.2 estimator application (2/3) Output feedback control = state feedback control + estimator plant Control Seoul Nat’l Univ.
1.Introduction 1.2 estimator application ( 3/3) • Practical areas • Speech- speech enhancement • Image- medical imaging- denoising • aerospace - target tracking- navigation- flight pass reconstruction • chemical process- distillation columns • mechanical system - motor system • biological area- cardiac arrhythmia detection Seoul Nat’l Univ.
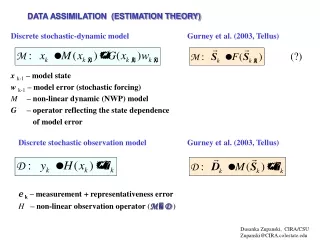
1.Introduction 1.3 Signal models (1/3) • Categories of signal models Time invariant Discrete-time State space Stochastic Modeled Linear Nonlinear Unmodeled Time varying Deterministic Generic linear model Continuous-time Seoul Nat’l Univ.
1.Introduction 1.3 Signal models (2/3) • State space signal model • In case of stochastic model : are random process and • In case of deterministic model : are deterministic signal and • Choice of model is important for model-based signal processing Seoul Nat’l Univ.
1.Introduction velocity 1.3 Signal models (3/3) • Modelled vs unmodelled signal • Unmodeled signal • Model based signal Seoul Nat’l Univ.
1.Introduction 1.4 Design objectives (1/1) • Stability of the filter • Estimation error ( often called performance ) unbiasedness : convergence : efficiency : • Robustness estimation error w.r.t signal model uncertainties • Computation load Seoul Nat’l Univ.
1.Introduction 1.5 Options for estimators (1/1) Performance Criterion generic linear minimax Signal Models infinite horizon Minimum variance stochastic state space least square deterministic receding horizon IIR (infinite horizon) FIR (receding horizon) Given Options Initial state dependent Initial state independent Nonlinear Estimator structure Linear Prediction Smoothing Filter Seoul Nat’l Univ.
1.Introduction Estimator structure Performance criterion Does it satisfy Desired properties Stability Robustness Small error . . . . . . 1.6 Objectives and design procedure (1/2) Yes No Signal models Optimal estimator desired properties Seoul Nat’l Univ.
1.Introduction 1.6 Objectives and design procedure (2/2) Objectives : Options Stability • FIR Small error • Performance criterion • Robustness • w.r.t uncertainties • w.r.t disturbance
1.Introduction 1.7 Options for estimator : smoothing, filtering, and predicting • Categories of estimators Current time Smoothing Filtering Predicting Seoul Nat’l Univ.
1.Introduction 1.8 FIRstructure (1/ 9) • Case 1 (IIR) • Case 2 (FIR) Which one do you think better ? Seoul Nat’l Univ.
1.Introduction 1.8 FIR structure (2/9) • BIBO stability of FIR estimators Case 1 (FIR) Case 1 (IIR) Seoul Nat’l Univ.
1.Introduction 1.8 FIR structure (3/9) • Robustness to model uncertainty Divergence of IIR filter (Kalman filter) Seoul Nat’l Univ.
1.Introduction Filter Structure Round-off digit 1.8 FIR structure (4/9) • Robustness to round off error : comparison of error covariance • Simulation environments • We assume that the filter gain is previously known by off-line calculation • Rounding off error is applied when updated • Model • Observation : • Though rounding at the 4th digit are not serious, rounding of 3rd and 2 nd digit makes difference between the FIR filter and IIR filter. Seoul Nat’l Univ.
1.Introduction In case of Filter Nominal systems • Be sure to be deadbeat using FIR structure for nominal systems. • Small error for noise or disturbance corrupted systems. 1.8 FIR structure (5/9) • Deadbeat property • Require to be deadbeat using nominal systems • Nominal systems = zero disturbance / noise system In case of Control • Stabilization the nominal system • Stabilization the disturbed systems Seoul Nat’l Univ.
1.Introduction 1.8 FIR structure (6/9) • Deadbeat property • Horizon size Noise State & estim. trajectory Exact filter (deadbeat phenomenon) Seoul Nat’l Univ.
1.Introduction 1.8 FIR structure (7/9) IIR filter FIR filter Original Time Filtered Magnitude Heavy distortion of phase at band gap Frequency Phase Seoul Nat’l Univ.
1.Introduction 1.8 FIR structure (8/9) • Advantage & disadvantage • Advantage of FIR • Use of DFT • Robustness to round off error • Linear phase • Guaranteed stability • Good for adaptive filter • Disadvantage of FIR • Computation load • H/W complexity cf. Infinite impulse response(IIR) : • Nonlinear phase • Not always stable • Easy to obtain from analog filter • Suitable for sharp cutoff characteristic and high speed Seoul Nat’l Univ.
1.Introduction 1.8 FIR structure (9/9) F I R I I R Seoul Nat’l Univ.
1.Introduction • Finite impulse response (FIR) : Independent of Linear Initial state free FIR 1.9 Initial state dependency (1/2) • Infinite impulse response (IIR) : dependent of Initial state dependent Linear IIR Seoul Nat’l Univ.
1.Introduction • Example : Try to guess who he is. 1. First case(our approach) Given, then guess Original picture Given, then guess 2. Second case(ex. Kalman filter) , 1.9 Initial state dependency (2/2) • Filter is to estimate stateThe initial state is also a state It is not logical to assume the initial state Seoul Nat’l Univ.
1.Introduction 1.10 Performance criterion (1/3) • Performance criterion Maximum Likelihood Minimum variance Least square Seoul Nat’l Univ.
1.Introduction • Performance criterion for Stochastic models- Minimum variance- Minimax variance- Minimum Entropy 1.10 Performance criterion (2/3) • Performance criterion for deterministic models- filter- Minimax filter- Least squares Seoul Nat’l Univ.
1.Introduction 1.10 Performance criterion (3/3) Objectives : Options Stability • FIR • Minimization Small error • Robustness • w.r.t uncertainties • w.r.t disturbance • Minimization of maxima Seoul Nat’l Univ.
1.Introduction 1.11 Extension to control : receding horizon control What is the receding horizoncontrol? Which one do you think better ? Seoul Nat’l Univ.
1.Introduction 1.11 Extension to control : desired property • Stability of the closed-loop systems • Small tracking error • Robustness stability tracking error Seoul Nat’l Univ.
1.Introduction 1.11 Extension to control : options for controls Performance Criterion I/O model Signal Models minimax stochastic LQG infinite horizon state space LQ deterministic receding horizon Given Options state feedback output feedback Finite memory control(including static control) Dynamic(IIR control) Control structure Seoul Nat’l Univ.
1.Introduction Does it satisfy 1.11 Extension to control : objectives and design procedures Desired properties Stability Robustness Small tracking error Yes No Signal models Optimal control desired properties Performance criterion LQG LQ Minimum entropy …… Control structure State feedback control Output feedback controlDynamic controlFinite memory control …… Seoul Nat’l Univ.
1.Introduction 1.11 extension to control : performance criterion with receding horizon • LQ • LQG Seoul Nat’l Univ.
1.Introduction 1.11 extension to control : receding horizon output feedback control • method 1 Filter Kalman filter filter Mixed filer …… State feedback receding horizon control LQC Control …… + Question : Is it optimal ? • method 2 Global optimal output feedback control FMC (finite memory control) cf) LQG Seoul Nat’l Univ.
1.Introduction 1.11 extension to control : receding horizon output feedback control • Computation Seoul Nat’l Univ.
1.Introduction • Receding horizon • Receding horizon • Receding horizon • Receding horizon • Receding horizon • Receding horizon Contents of standard textbook on optimal control and estimation • 1. LQ control • Finite horizon • Infinite horizon • 2. Kalman filter • Finite horizon • Infinite horizon • 3. LQG control • Finite horizon • Infinite horizon • 4. Full information control • Finite horizon • Infinite horizon • 5. filter • Finite horizon • Infinite horizon • 6. Output feedback control • Finite horizon • Infinite horizon Covered in this class Seoul Nat’l Univ.