Download
1 / 22
220 likes | 360 Views
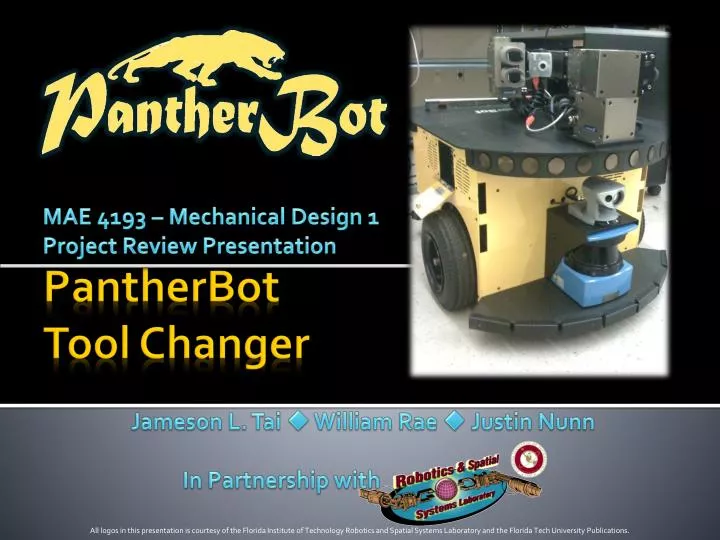
MAE 4193 – Mechanical Design 1 Project Review Presentation. Panther B ot T ool C hanger. Jameson L. Tai William Rae Justin Nunn In Partnership with .

E N D
MAE 4193 – Mechanical Design 1 Project Review Presentation PantherBot Tool Changer • Jameson L. Tai William Rae Justin Nunn • In Partnership with All logos in this presentation is courtesy of the Florida Institute of Technology Robotics and Spatial Systems Laboratory and the Florida Tech University Publications.
Introduction • Organizational Breakdown • Project Background • Design Objectives • Tentative Designs • Project Timeline • Recommendations
Project Background • The PantherBot, also known as the PowerBot made by MobileRobotics, Inc., is a multifunctional robot • autonomously mapping terrain • equipped with sonar and laser range finder • robotic arm fitted with a parallel gripper and webcam • has a 802.11b WiFi antenna for wireless communications (Image Source: RASSL
Project Background (Image Source: RASSL)
Project Background • This team will create an autonomous tool changer such that the PantherBot will be able to perform the following functions inside the Olin Engineering Complex: • Open doors via twisting door handles • Open front door via pressing the handicap accessible button • Press appropriate buttons to recall and operate an elevator (Image Source: Robotics and Spatial Systems Laboratory (RASSL))
Design Objectives • To research on appropriate tools to perform the following functions in the Olin Engineering Complex without harming the PantherBot: • Open doors via twisting door handles • Open front door via pressing the handicap accessible button • Press appropriate buttons to recall and operate an elevator
Design Objectives • The tool changer and tools must not block the normal operations of the robot nor create safety hazards from usage of the tool changer. • This means this tool changer must not block or damage the following: • sonar sensors, • laser range finder sensor, • cameras, • emergency stop buttons, • any vents or access panels. • The tool changer also must not add any additional width to the robot since it is already approaching the width of a standard doorway.
Research • Topics to be researched: • Current door opening robots • Tool changing devices • Materials • Research is focused on examining other machines that can open doors and on various different devices that are used for changing out tool ends • Once sufficient research has been done in these areas, research on materials that need to be used will be conducted as designs for our tools are made
Design and Analysis • To meet the goals of interacting with doors and buttons, as well as storing and exchanging the tools, we will need to optimize our design for reliability, size and weight. • To do this we will use FEA with physical prototypes. • Weight restrictions are due to the forces the tool will put on the arm. • FEA testing will primarily be used to find areas where material needs to be added or can be removed to lighten the tools.
Design and Analysis • Arm Forces • To prevent damage to the arm we need to calculate the forces exerted on the arm in all configurations. • The arm is capable of withstanding higher loading if the joints are locked. • Swinging the arm with a heavy tool on the end puts the motors at risk if motion is not started and stopped smoothly. • Tool paths must be optimized to minimize forces on the arm
Fabrication Plan • We will fabricate most parts through Building 538 (Machine Shop) • If needed, we have set aside a budget for any necessary rapid prototyping before we proceed. • We will obtain reasonable off-the-counter parts if it is more cost effective to purchase the part than to produce in-house.
Testing Plan • We have set aside a budget for a testing rig, which will provide a viable test platform • Opening doors • Pushing door panel button • Pushing elevator buttons • The testing platform will provide feedback to the team regarding the repeatability of the tools, ease of operation, and storage functions. • Also, it will help determine if there are any problems with the tools before the PantherBot performs the predefined functions inside Olin Engineering Complex.
Tentative Designs • Button Pusher • Shall protect PantherBot’s body as well as its robotic arm • Shall protect elevator buttons and panels while tool is used • All motion will be generated by the parallel grippers
Tentative Designs • Door Opener • Shall open doors from both sides • Shall accommodate door handles in the left and right orientations • Shall allow the PantherBot to pass through safely before door returns to closed position
Tentative Designs • Tool Rack • The tool rack will be designed to accommodate the tools that are produced • Rough ideas: • Tentative positions of tools • Door opener will be contained in the front left (near the vent) of the PantherBot • Button pusher will be contained in the front right section since it is a larger tool. • Mounting • Tools will be mounted to existing structural rails.
Project Timeline Fall 2008 • Complete research in door opening techniques • Pushing door (September 2008) • Pulling door (September 2008) • Present tool design (October 2008) • Present tool changer rack design (October 2008) • Preliminary Design Review • Presentation (22 October 2008) • Report (22 October 2008) • Analysis on tools and tool changer (November 2008) • Final Presentation (03 December 2008) • Final Report (03 December 2008)
Project Timeline Spring 2009 • Fabrication (February 2009) • Testing (March 2009) • Showcase (April 2009)
Preliminary Budget • Test Stand Hardware $ 150 • Shop Materials $ 400 • Adapters to existing PantherBot arm $ 250 • Bushings/Bearings/Shafting $ 100 • Surface finishing $ 50 • Rapid Prototyping $ 250 • Miscellaneous Hardware $ 50 • Total Budget $1,250
Conclusion • We have a preliminary design of our button pusher. • We have conducted research on door opening mechanisms that would integrate with existing hardware. • We are working on several designs of our tool storage system. These designs will be revised as the tools are finalized.