Download
1 / 23
230 likes | 243 Views
This project outlines the implementation of a real-time Turbo decoder for DSP systems. It covers Turbo encoding, decoding, DSP implementation issues, performance analysis, and conclusions on Turbo codes. Turbo codes were introduced in 1993 and show a BER of 10E-5 at 0.7dB using block size 65,536 bits with R=1/2 code. The Turbo encoder utilizes two RSC encoders in parallel concatenation and an interleaver, while the decoder uses the SOVA algorithm with two decoders in serial fashion. The project discusses the importance of interleavers and the steps in Turbo decoding using Viterbi algorithms. The performance in an AWGN channel shows a data rate of 91.6 Kbps per decoder. Conclusions highlight the successful implementation of a real-time Turbo decoder for DSP systems, matching MATLAB performance at high SNRs and enabling real-time voice processing at approximately 22 Kbps for 2 iterations.

E N D
Real-Time Turbo Decoder Nasir Ahmed Mani Vaya Elec 434 Rice University
Outline • Description of Turbo Encoding • Description of Turbo Decoding • DSP Implementation issues • Performance Analysis • Conclusions
Turbo Codes • First introduced in 1993 • Parallel Concatenation of two Convolutional Coders with interleaving • Original results showed a BER of 10E-5 at 0.7dB using block size 65,536 bits • For rate R=1/2 code, 0.7dB off channel capacity
Turbo Encoder • Parallel concatenation of at least two RSC encoders, with second encoder seeing interleaved version of data • Utilize only one of the systematic streams
Turbo Encoder • The output stream of data consists of the systematic data, parity bits from encoder1, and parity bits from encoder2 • Through the use of the interleaver, the decoder will have two independent looks at the same data, and can use both streams to decode the information sequence
Convolutional Coder • Utilize recursive systematic (RSC) encoders • Unlike feed forward coders, a single 1 in the input will lead to large weight codeword • Performance of turbo codes dependent on low weight codewords
Interleaver • Interleaving is used to reorder the input bits • Random interleaver used for large block sizes • For small block sizes (<1000), random/block interleavers show similar performance • Block interleavers have simple interleaving/de-interleaving mechanism
Importance of Interleaver • At a given SNR, tradeoff between latency due to interleaver and QOS • Small block sizes (~300 bits) can be used for real time voice • Mid range block sizes (~4000 bits) used for video play back • Large block sizes (~16000 bits) large latency, very low BER, useful for file transfer
Turbo Decoding • Two decoders used in serial fashion, with output of one decoder used as prior information to next decoder • Feedback in decoding circuit allows for multiple iterations, and improves bit error performance
Decoder • Constituent decoders need bit probability estimates to be used as priors to the next decoder: standard Viterbi cannot be used for this reason • Soft Output Viterbi Algorithm used (SOVA) • The output of decoder1 contains information that can be used as a prior probabilities for decoder2, and vice versa
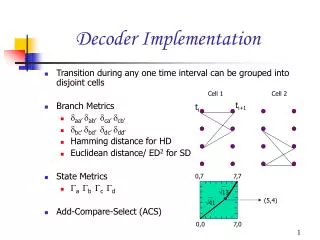
Steps in Viterbi Algorithm • Calculation of branch metric (distance from received data) • Calculation of path metric (Add compare select) • On reaching the end of trellis, start from the best state • Trace back (knowing the Path metrics) • Decide the data bits while tracing back
Steps in Turbo Decoding • Evaluate the path metrics • Trace back to obtain the decisions (x) • Trace back using alternate paths to obtain the metric differences • Compute the minimum of all possible metric differences for that stage • Obtain the reliability of decision • Pass this reliability of decision to next decoder • Iterate the above steps
Path Metric Calculation for SOVA s(i) : state of ith path at time k uk(i): information bit Ys: received systematic bit, Yp: received parity bit Mk(s(i)): path metric of ith path at time k Lc : Channel value = 4*Ec/N0 L(uk): output from previous decoder
Reliability of decisions Δlk= Mk+l(s(il)) – Mk+l (s(i’l)) Δlk : Metric difference l: index of all non surviving paths L(uk) = uk * Min(Δlk) Min(Δlk ) : Reliability of the decision
Our Implementation • Rate 1/3 coding • Constraint length = 3 • Frame length = 400 • SOVA algorithm used • Number of iterations are flexible
Algorithmic Issues • Two iterations of Turbo decoding used • Traceback depth set at 5 times the constraint length (optimal for Viterbi decoding) • BPSK modulation used (+/-1) • Extrinsic Information (Le(u)) scaled after every decoder
Fixed point Issues • Used Q-15 format • Received signal (from AWGN channel) clipped to lie in a range of +/-1 • Received signal scaled by a constant factor (32) to avoid overflow
Data Rates • Clock cycles / decoder = 654659 • Execution time / decoder = 4.36 ms • Data rate /decoder = 91.6 Kbps • Data rate/ iteration = 45.8 Kbps
Conclusions • Fixed point SOVA based Turbo decoder implemented • Performance of DSP matches MATLAB at high SNRs • Real time voice processing possible using our implementation (~22 Kbps for 2 iterations)