Download
1 / 62
620 likes | 653 Views
Understand the technology of AC drives and motors by Rockwell Automation. Learn about motor fundamentals, operation, and construction for efficient torque production. Presented in a Spring Update CD from May 2001.

E N D
TORQUE PRODUCTION WITHAC DRIVES & MOTORS:Understanding the technology Developed by, Rockwell Automation Drives Business Reliance Electric Spring Update CD, May 2001
Presentation Abstract After 25 years of AC Drive acceptance, drive manufacturers offer the industry many types of control methods. We’ll review some motor & drive basics and then discuss the technologies offered in AC Drives along with the selection process. Spring Update CD, May 2001
AC & DC Motor Basics REVIEWING MOTOR FUNDAMENTALS Spring Update CD, May 2001
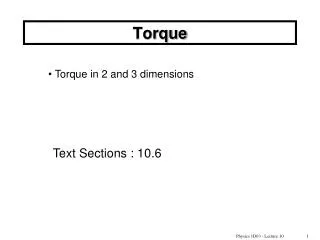
Torque 100% Nameplate HP is only achieved at base speed, NOT BEFORE! Horsepower Base Speed RPM Motor Basics Motor nameplate HP is achieved at Base RPM: HP = Torque * Speed / 5252 Constant Torque Range Constant Horsepower Range Spring Update CD, May 2001
Motor Frame Assembly Stator Winding Assembly Rotor & Shaft Assembly Motor Basics - AC Motor Construction 3 phase stator winding circuit w/ connections T1, T2 & T3 Spring Update CD, May 2001
120 * Frequency # Motor Poles Note that Frequency is the only variable to affect motor speed Motor Basics - AC Motor Operation 2 Pole Motor Motor RPM is equal to: Rotating Magnetic Field of a 2 Pole AC Induction Motor Spring Update CD, May 2001
Commutator & Brush Assembly Armature Assembly Motor Basics - DC Motor Construction Field Poles Assemblies NOTE: The Armature & Field Circuits are mechanically fixed at 90° at all times Distinct Armature & Field Circuits are mechanically separated Spring Update CD, May 2001
Voltage - ( Voltage Drop ) Field Flux Arm S N V V Motor Basic - DC Motor Operation Simple Model Motor RPM is equal to: Both Armature Terminal Voltage & Field Strength affect DC Motor speed To create motor torque at the shaft, we increase Armature Current Rotating Magnetic Field of a 2 Pole AC Induction Motor Spring Update CD, May 2001
Motor Basics - AC & DC Summary Key Points of Understanding • AC Induction Motors have one circuit to connect • Connection to T1, T2 & T3 for the stator • DC Motors have 2 separate circuits to connect • Connection to F1 & F2 for the Field • Connection to A1 & A2 for the Armature • To make AC Motors perform like DC Motors • Treat the AC motor like a 2 circuit machine Mechanical differences must be overcome mathematically Spring Update CD, May 2001
AC Drive Basics PWM AC DRIVE FUNDAMENTALS Spring Update CD, May 2001
Motor AC Line Diode Rectifier IGBT Inverter DC Bus Filter Drive Basics - PWM AC Drive Construction • Diode rectifier converts AC line voltage to fixed voltage DC. • DC voltage is filtered to reduce current ripple from rectification. • Inverter changes fixed voltage DC to adjustable PWM AC voltage. Spring Update CD, May 2001
VLL @ Drive 500 Volts / Div. + DC Bus 1 - DC Bus 3 Phase Current 10 Amps / Div. M2.00s Ch1 1.18V AC Drive Basics - PWM AC Waveforms PWM waveform is a series of repetitive Voltage pulses Spring Update CD, May 2001
Operation at Base Speed Output Voltage 460 Ratio @ 460VAC = 7.67 V/Hz 230 115 Hz Output Frequency 0 15 30 90 60 Base Frequency AC Drive Basics - V/Hz Operation At 100% of the motor’s base speed, the V/Hz ratio is determined: HP = 100% of motor nameplate Motor speed is controlled by ramping Voltage & Frequency Spring Update CD, May 2001
Output Voltage 460 Ratio @ 460VAC = 7.67 V/Hz 230 115 Hz Output Frequency 0 15 30 90 60 Base Frequency AC Drive Basics - V/Hz Operation At 50% of the motor’s base speed, the V/Hz ratio is maintained: HP = 50% of motor nameplate Operation at 50% Base Speed At 50% of base speed, Voltage & Frequency decrease by 1/2 Spring Update CD, May 2001
At 25% of the motor’s base speed, the V/Hz ratio is maintained: HP = 25% of motor nameplate Output Voltage 460 Ratio @ 460VAC = 7.67 V/Hz 230 115 Hz 0 15 30 90 Output Frequency 60 Base Frequency AC Drive Basics - V/Hz Operation Operation at 25% Base Speed At 25% base speed, Voltage & Frequency decreases by 3/4’s Spring Update CD, May 2001
Output Voltage 460 Ratio @ 460VAC = 7.67 V/Hz + % BOOST 248 138 Voltage Boost Hz Output Frequency 0 15 30 90 60 Base Frequency AC Drive Basics - V/Hz Operation To increase starting torque, V/Hz Drives use Voltage Boost to over-flux the motor to increase starting torque Offsetting the voltage ratio increases motor starting torque Spring Update CD, May 2001
AC Drive Basics - V/Hz Operation Voltage Boost over prolonged operating periods may result in overheating of the motor’s insulation system and result in damage or premature failure. CAUTION: Motor Insulation Life is decreased by 50% for every 10C above the insulation’s temperature capacity Unable to perform like DC, the industry looks to Vector Control Spring Update CD, May 2001
AC Drive Basics - Vector Operation If we can de-couple and Regulate Current, the component that creates torque at the motor, we can regulate motor torque, not just motor speed! This is the premise for Vector Control Current Regulation allows Torque Control Spring Update CD, May 2001
AC Drive Basics AC VECTOR DRIVE FUNDAMENTALS Spring Update CD, May 2001
AC Drive Basics - Motor Modeling AC Drive Parameters create a “Motor Model” based on data entered in the drive parameters • Motor Magnetizing Current • Motor Full Load Amps • Motor Voltage • Motor Base Frequency • Motor Base (Slip) RPM • Motor Horsepower Correct Motor Data is the most important factor for success Spring Update CD, May 2001
AC Drive Basics - Motor Modeling AC Drive Parameters: “Magnetizing Current” • Magnetizing Current is the current required to excite the motor laminations and copper winding w/o doing work. • Magnetizing Current is: NO LOAD AMP draw less friction and windage • Establishes the motor’s Flux • (FLA - Mag. Amps) = 100% Torque Current • Wrong data will reduce motor torque production Magnetizing Current will range from 35% to 50% of FLA value Spring Update CD, May 2001
100% Torque Current 90 Magnetizing Current AC Drive Basics - Vector Operation Torque is produced, as well as regulated even at “0” RPM Magnetizing Current = Motor No Load Amps “a fixed value from “0” RPM to Motor Base RPM” Magnetizing Current is the equivalent of Field Current Spring Update CD, May 2001
AC Drive Basics - Motor Modeling AC Drive Parameters: “Full Load Amps” • The motor FLA value may set the scaling for: • Motor Overload • Drive Overload • Torque Current Available • (FLA * %OL) - Mag. Amps = Max. Available Torque Current • Wrong data affects available torque current and may allow damage to the motor. Since every Vector algorithm is unique, check w/ manufacturer Spring Update CD, May 2001
AC Drive Basics - Motor Modeling AC Drive Parameters: “Voltage & Base Hz” • Voltage & Base Hz values will: • Establish the motor V/Hz ratio for the drive output • Wrong data will cause motor heating and possibly reduce motor torque as well as shorten insulation life. Needed to assure proper motor operation w/o over-heating Spring Update CD, May 2001
AC Drive Basics - Motor Modeling AC Drive Parameters: “Base HZ & RPM” • Base Hz & RPM values will set the scaling for: • Calculation of motor slip • Identifies expected motor RPM at Frequency • Allows for speed error detection & correction • Establishing the point of field weakening • Wrong data here can cause excessive current draw AC Drives regulate speed based upon motor slip Spring Update CD, May 2001
AC Drive Basics - Motor Modeling AC Drive Parameters: “Horsepower” • The Horsepower value may be used to: • Estimate the expected motor impedance • Estimate the expected motor inductance • Calculate the torque loop gains • Wrong data here can cause poor speed and torque regulation Horsepower information gets us “in the Ballpark” Spring Update CD, May 2001
100% 100% Torque Current Torque Current 90 90 90 Magnetizing Current Magnetizing Current AC Drive Basics - Vector Operation Flux Vector Drives act very much like DC Drives Magnetizing Current is decreased above Motor Base RPM Field Weakening occurs whenever we exceed Motor Base RPM Spring Update CD, May 2001
100% Torque Current Torque Current 10% 90 90 Magnetizing Current Magnetizing Current AC Drive Basics - Vector Operation Torque at the motor shaft based upon load Torque Current = Motor Load at the Shaft “a variable value” during speed regulated operations Torque Current increases or decreases dependent upon load Spring Update CD, May 2001
100% Torque Current Torque Current 10% 90 90 Magnetizing Current Magnetizing Current AC Drive Basics - Vector Operation Torque at the motor shaft based upon “Torque Reference” Torque Current = Reference setting “a fixed value” during torque regulated operations Torque Current can be commanded as a reference value Spring Update CD, May 2001
100% Torque Current Poor Torque Production & Regulation ie: Impact Load Optimized Torque Production Torque Current 90 ? Magnetizing Current Magnetizing Current AC Drive Basics - Vector Operation Torque production suffers if 90° is not maintained Improper tuning, incorrect motor parameters, problems with motor speed feedback or undersized drive applications will result in poor load (torque) regulation. Motor torque is optimized ONLY when 90 is maintained Spring Update CD, May 2001
? If the Nip Rolls are engaged during web travel, a condition with forward velocity and reverse torque can occur. Use either V/Hz or a closed loop system if inertia or speed is high. AC Drive Basics - Vector Operation Load Type: Forward Speed & Reverse Torque How a load becomes applied to the drive system can be critical to system success. A load where there is Forward Velocity & Reverse Torque is the most difficult load to handle. Time to find motor rpm & position is limited by inertia & speed Spring Update CD, May 2001
100% Torque Current Torque Current Motor Current Motor Current 90 90 Magnetizing Current Magnetizing Current AC Drive Basics - Vector Operation Motor Current is = Vector Sum of Torque & Magnetizing This is where the term VECTOR DRIVE is derived 100% A² + B² = C² Motor Current is what’s measured with a clamp-on meter Spring Update CD, May 2001
Current Feedback Motor L1 L2 L3 E Micro P AC Drive Basics - Flux Vector Operation Flux Vector Drives regulate current & torque using rotor speed & position to optimize torque at the motor shaft along w/ current feedback from the motor. Encoders provide rotor speed & position information Spring Update CD, May 2001
HOT Motor % Torque Torque accuracy of 5% or better ! COLD Motor Inch - Lbs AC Drive Basics - Rotor Temperature & Torque As motor temperature reaches nominal operating values, torque linearity and accuracy improves in FVC operation Spring Update CD, May 2001
Voltage Feedback Motor L1 L2 L3 E Micro P AC Drive Basics - Field Oriented Control Field Oriented Control uses the same basic technology as Flux Vector Control, but adds Voltage Feedback to optimize / adapt to changes in motor temperature. The drive continuously adapts to motor temperature change Spring Update CD, May 2001
AC Drive Basics - Summary Key Points of Understanding • Errors in Encoder Feedback affect the Micro-Processor • Speed instability will occur • Encoder Feedback Signals must be NOISE FREE • Select an appropriate encoder for Vector Motor use • Proper grounding is very important • Motor Data programmed in the drive must be accurate Motor information, measured or programmed is key to success Spring Update CD, May 2001
AC Drive Basics - Sensorless Vector Operation There are actually 2 types of drives advertised as Sensorless Vector; • Those with a V/Hz Core • Those with a Vector Core All Sensorless Vector Drives are NOT the same! Spring Update CD, May 2001
AC Drive Basics - Sensorless Vector Operation SVC with V/Hz Core Technology • Use sophisticated “Current Limiting” algorithms to improve constant torque & starting torque operation • Typically needs less motor information for setup adding some simplicity • Can operate multiple motors from one drive • ONLY regulates V/Hz output, clamps CURRENT • Can only operate as a Speed Regulator, NOT TORQUE V/Hz Core SVC Drives can operate multiple motors Spring Update CD, May 2001
AC Drive Basics - Sensorless Vector Operation SVC with Vector Core Technology • De-couples Torque & Magnetizing Currents to maintain 90 alignment • Typically needs more motor information for setup adding some complexity • Can operate only one motor per drive due to the information required to regulate current • Regulates SPEED and Regulates TORQUE Vector Core SVC Drives can operate only one motor at a time Spring Update CD, May 2001
Current Sensors L1 Motor L2 L3 Micro P ( FVC + Speed Estimator ) AC Drive Basics - Sensorless Vector Operation SVC Drives w/ a Vector Core estimates rotor speed & position A “Speed Estimator” calculates rotor speed & position Spring Update CD, May 2001
POSITION SPEED TORQUE MOTOR Position Reference is optional in most Vector Controls, internal in some Speed Reference is typical of how we control motor operation Torque Reference can made directly, bypassing the speed loop as a reference for applications such as Winders & Test Stands AC Drive Basics - Control Loops There are 3 Basic Control Loops in High Performance Drives: 10 rad/sec 100 rad/sec 1,000 rad/sec Bandwidth ratio between loops ranges from 3:1 to 10:1 Spring Update CD, May 2001
Typical Regulator Control Diagram for FVC AC Line Speed Reference + Torque Command Torque Loop SpeedLoop Gate Signals PWMInverter - Flux Command Current Feedback FieldController ACMotor Rotor Speed & Position E Speed Feedback AC Drive Basics - Regulator Diagram Spring Update CD, May 2001
AC Motor Basics - Inverter Duty INVERTER DUTY MOTORS Spring Update CD, May 2001
Blowers may be added to motors to allow operation at low speed including “0” RPM with 100% Torque continuous Some motor frames are sized so that just the surface area is suitable to dissipate motor heat w/o the need of a fan or blower AC Motor Basics - Inverter Duty Spring Update CD, May 2001
Match Motor type to meet your needs! AC Motor Basics - Inverter Duty Types of AC Motors T-Frame Construction Motors allow commonality in footprint & shaft height. Definite purpose “laminated frame” designs provide higher power densities & improved torque to inertia performance. Spring Update CD, May 2001
Rotor design affects torque production! Standard Industrial AC Motor “double squirrel cage” Rotor Design for improved across the line starting torque. Definite purpose “single squirrel cage” rotor design for Variable Frequency Drive use AC Motor Basics - Inverter Duty Rotor Designs Vary by motor type: Spring Update CD, May 2001
Rotor heating affects torque production! Resistance Stator Inductance Stator Inductance Rotor + Current Working Inductance Magnetizing Resistance Rotor AC Input Voltage - AC Motor Basics - Equivalent Circuit Diagram Equivalent Circuit Diagram of an AC Induction Motor Spring Update CD, May 2001
NEMA Design ‘B” Motor Breakdown Torque Rule of Thumb: Approximately 80% of BDT (ft-lbs) is usable for PEAK Torque needs when current is available. Therefore, current headroom from the drive can improve recovery from sudden load changes. Full Load Torque AC Motor Basics - Drive Operating Region Peak Torque capacity is dependent upon the motor BDT % Spring Update CD, May 2001
Breakdown Torque identifies Peak Torque capabilities AC Motor Basics - Drive Operating Region NEMA Design “B” Motors vary in Breakdown Torque capacity Spring Update CD, May 2001
100 Torque 90 % TORQUE 80 Torque 70 60 50 40 Acceptable Region for Continuous Operation 30 20 10 0 12 18 36 42 48 54 60 66 78 0 24 30 72 84 90 6 HZ AC Motor Basics - Operating Range Speed / Torque Curve of an AC Drive & Inverter Duty Motor Inverter Duty Motors operate at 1/10th Base RPM Spring Update CD, May 2001