Download

1 / 47
470 likes | 489 Views
מדידות GNSS. מרצה ועורך: עומר בר. מבוא. מבוא. GNSS - Global Navigation Sattelite System : מערכת ניווט לוויינית המתבססת לוויינים ייעודים אשר מסתובבים סביב כדור הארץ ומשדרים אותות אלקטרומגנטיים שבעזרתם ניתן לקבוע מיקום מוחלט ומיקוםיחסי .

E N D
מדידות GNSS מרצה ועורך: עומר בר
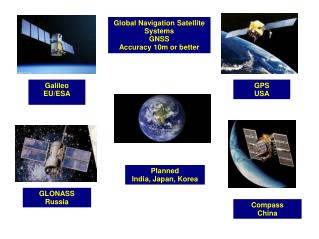
מבוא • GNSS - Global Navigation Sattelite System: • מערכת ניווט לוויינית המתבססת לוויינים ייעודים אשר מסתובבים סביב כדור הארץ ומשדרים אותות אלקטרומגנטיים שבעזרתם ניתן לקבוע מיקום מוחלט ומיקוםיחסי. • מספקת דיוק מוחלט של כ 5 מטרים (אופקי), וניתן להשתמש בה בדיוק יחסי של עד מספר מילימטרים. • המערכת מורכבת משלושה חלקים: • מערך הלוויינים - עשרות לוויינים החגים סביב כדור הארץ. • מערך הבקרה - תחנות בקרה המקבלות אותות מהלוויין. • מערך המשתמש - משתמשי קצה המעוניינים לקבל מיקום. GPS – אמריקאי GLONASS – רוסי GALILEO – אירופאי BEIDU – סיני QZSS – יפני COMPASS – הודי
משוואת המיקום 4 נעלמים: 3 פרמטרי מיקום (XYZ) 1 היסט זמן משעון GPS 4 נעלמים, פתרון 1 דורש 4 משוואות כל לוויין מספק משוואה, לכן צריך 4 לוויינים גורמי השגיאה העיקריים בתהליך הינם: עיכוב יונוספרי עיכוב טרופוספרי שגיאת שעון מקלט שגיאת שעון לוויין שגיאות רנדומאליות (מתוכן ניתן למדל את שגיאת רב-הנתיב) רוב השגיאה "כלפי מעלה"
השיטה היחסית (דיפרנציאלית) השיטה מבוססת על מדידה משותפת ובו זמנית של שני מכשירי מדידה לפחות (אנטנה ומקלט גיאודטיים) אל 4 לווייני ניווט מאותה מערכת (לפחות). בעזרת מערכת נוסחאות חישוב מהיקום העצמי, ניתן להרכיב נוסחאות לחישוב מיקום יחסי (המתבסס על הפרשי הנוחסאות) – ניתן להשוות תהליך זה ל"חיסור ווקטורי" [הערה: נוסחאות המיקום מתארות את כלל השגיאות הניתנות למידול בעת חישוב הערכת המרחק אל הלוויין]
משוואות המיקום היחסי משוואות המיקום המוחלט עבור לוויין 11 מתחנה P משוואות המיקום המוחלט עבור לוויין 11 מתחנה K
Single difference הפרש יחיד מתאר את היחס בין שתי תחנות לאותו הלוויין שגיאת שעון הלוויין מתבטלת לחלוטין
Double diffrence • הנחות בסיס: • מכשירי המדידה "קרובים" • שגיאות היונוספירה זהות • שגיאות הטרופוספירה זהות יתרונות: אין שגיאות שעון מקלט שיגאות יונוספירה וטרופוספירה מצטמצמות
Double difference – fixed phase solution - אורך הגל N - כמות אורכי הגל השלמים • הנחות בסיס: • מכשירי המדידה "קרובים" • שגיאות היונוספירה מצטמצמות באפן החישוב • שגיאות הטרופוספירה זהות יתרונות: אין שגיאות שעון מקלט שגיאת יונוספירה מצטמצמת שגיאת טרופוספירה קטנה 12
Double difference – fixed • פתרון וקטורים עבור צרכים גאודטיים • הפתרונות המוצעים ע"י תוכנות מסחריות מחולקים ל 2: • Double Difference Fixed (per-frequancy) • פתרון ווקטור בשימוש קוד ו-פאזה תוך כדי השמטת השפעת היונוספירהתוך כדי המשוואה – כלומר שימוש בתדר בודד. • עבור וקטורים קצרים (< 5KM) • Double Difference Fixed IonoFree • פתרון ווקטור בשימוש קוד ו-פאזה תוך כדי שימוש בצירוף תדרים. • שינוי משוואות הפתרון כך שהצירוף יבטא/יתאר את השפעת היונוספירה. • עבור וקטורים ארוכים(> 5KM) ועבור דיוק אנכי גבוה • שילוב פתרונות אלו בפרוייקטים גאודטיים והנדסיים הינו נדרש
RTK – Real Time Kinematic אנטנה גיאודטית המוצבת על מיקום ידוע (תחנה בעלת מיקום ודיוק ידועים) ומקלט גיאודטי משמשים כתחנת בסיס (BASE) משדרים תיקונים אל מקלט מתנייד (Rover). ה Rover מחשב מיקומו מחדש על בסיס תיקונים אלו ומקבל את מיקומו בדיוק גבוה. הפתרון הינו פתרון יחסי בזמן אמת בדיוק סנטימטרי. התיקונים מבוססים על ההפרש בין המיקום הידוע לזה המחושב בזמן אמת של תחנת ה BASE, והינם קשורים באופן הדוק למדידות הפאזה ופתרון הפאזה.
הנחיות המדידה • תקנות המדידות 2016 קובעות את דיוקי תוצרי המדידה הנדרשים עבור כל פרויקט גיאודטי, מיפויי וקדסטרי. • כדי להפוך את עבודת המודד לאפשרית וברורה, המרכז למיפוי ישראל מנגיש תשתיות גיאודטיות שונות עבור המודד וכן הנחיות המדידה מתארות באופן ברור את צורת העבודה בשדה ועבודת המשרד מתוך מטרה להשיג את הדיוקים הנדרשים.
הנחיות המדידה • התשתית המונגשת אל ציבור המודדים הינה תלת ממדית ונמצאת תחת בקרה מתמדת, המחולקת למספר דרגות: • רמה G, הכוללת את : • (א) מערך תחנות הקבע של מפ"י (G0) • (ב) רשת גיאו-דינאמית למעקב תנועת הקרקע (G1) • (ג) רשת G2 שמטרתה לצופף ולקרב את הרשת התלת מימדית אל ציבור המודדים והרשויות (אזוריות ועירוניות כאחד) • מערכי תחנות הקבע של מודדים פרטיים – דרגה S0
הנחיות המדידה ההנחיות מתארות את שיטות העבודה ביחס לתשתית הקיימת ב 5 שיטות עיקריות:
הנחיות המדידה - כללי • ציוד המדידה: • המקלט הגיאודטיהמשמש לביצוע המדידות יהיה בעל מאפיינים כדלקמן: • בעל יכולת קליטה ורישום נתוני הגל הנושא L1 לפחות. • ניתן להשתמש במקלט שקולט מערכות ניווט לווייני נוספות פרט ל GPS. • אנטנת ה- GNSS הגיאודטית(להלן: "אנטנה") צריכה להיות בעלת מאפיינים כדלקמן: • אנטנה בעלת מרכז פאזה קבוע ובעלת פרמטרי כיול מוצהרים. • אנטנה בעלת סימון מוצהר וברור של נקודת הייחוס (ARP). • האנך האופטי והפלס של הטריברך להצבה ופילוס האנטנה יהיו מכוילים.
הנחיות המדידה – עבודת שדה • מיקום הנקודות החדשות יבחר בקפידה ויתאים למדידות לווייניות (בדגש על שמיים פתוחים ככל הניתן, ואם ניתן תוך התייחסות אל מיסוך אלקטרו-מגנטי). • עבודת השדה תתבצע תוך התייחסות להמלצות היצרןבדבר הגדרות המקלט (משך זמן המדידה, קצב דגימה וכדומה). אם יש סתירה בין המצלות היצרן והנחיות אלה, קובעות ההנחיות. • אנטנת מקלט ה- GNSS המוצבת על נקודת בקרה (חדשה או קיימת) תיוצב באמצעות חצובה קבועה בלבד במשך כל זמן המדידה במדידותPost-processing ו - חצובה או מוט עם דו-רגל במדידות RTK.
הנחיות המדידה – עבודת שדה • גובה האנטנה מעל לנקודה לא יעלה על 2.0 מטרים בשימוש חצובה (במדידה בשיטות Post-Processing שיטות 1,2,3,4 ) ו-2.5 מטרים בשימוש במוט ( במדידה בשיטות RTK שיטות 5.1 ,5.2) • קצב הדגימה של המדידות (Epoch interval) יהיה של מדידה אחת בשנייה אחת לפחות – כלומר 1 Hz. • יש למדוד כל נקודה חדשה פעמיים בשתי מערכות מדידה שונות ונפרדות כאשר פרק הזמן בין סוף המערכה הראשונה לתחילת המערכה השנייה לא יהיה קטן מ-60 דקות. • נקודה חדשה בדרגה H4 יש למדוד לפחות פעמיים בשתי מערכות מדידה בימים שונים. במידה ומערכות המדידה מבוצעות בימים עוקבים ,אין למדוד את שתי המערכות באותם זמנים ביום.
הנחיות המדידה – עבודת שדה עבודה בתנאים מגבילים מחייבת זמן מדידה ארוך יותר, כגון : אזור עירוני צפוף או כיסוי חלקי של כיפת השמיים קרבה לעצים ומבנים מיסוך אלקטרו מגנטי אשר יוצר הפרעות על תדרי מערכות הניווט הלווייניות השונות (כגון מכ"מים באזורי שדות תעופה) טבלה 1 – משך זמן המדידה המזערי למערכת מדידה
הנחיות המדידה – ביקורת • בכדי לבדוק את תקינות המדידה, אופן העיבוד וההתמרה, יש למדוד נקודת בקרה אחת לפחות לביקורת שאושרה ע"י המרכז למיפוי ישראל. • על נקודת הביקורת להיות בדרגה זהה או גבוהה מדרגת הנקודות החדשות הנמדדות. • עבור שיטות מדידה 1 ו- 2 יש למדוד נקודות ביקורת בכל יום מדידה לפחות פעם אחת. • במדידה בשיטת RTK יש למדוד נקודות ביקורת בתחילת ובסוף כל יום עבודה. • כל שינוי בתצורת ציוד המדידה במהלך יום המדידה יש למדוד מחדש נקודת בקרה לביקורת.
הנחיות המדידה – ביקורת • כאשר נקודות חדשות נמדדות באמצעות יותר ממקלט GNSS אחד יש למדוד נקודת בקרה לביקרות עבור כל אחד מהמקלטיםהמשמשים למדידתן. • נקודת ביקורת עבור נקודות מרמה H תהיה בעלת גובה אורתומטרי מאושר. • ההפרש בין הערכים המדודים של נקודת הביקורת ברשת התקפה לערכיה הידועים לא יעלה על המופיע בטבלה 2. אם ההפרש עולה על הערך המופיע בטבלה 2יש לחזור ולבצע את העבודה או חלק ממנה תוך שימוש בנקודת ביקורת אחרת. טבלה 2 – הפרש אופקי ואנכי מרבי מותר בנקודות הביקורת.
הנחיות המדידה – עיבוד, חישוב ותאום • לחישוב הווקטורים יש להשתמש בתוכנה המאפשרת להגיע למאפייני הדיוק המוגדרים בתקנות • תנאי בסיסי ויסודי הוא קבלת פתרון של Double difference fixed • (בעיבוד מדידת נקודות בדרגה H4 , H5 , ו- H6 יש להגיע לפתרון Double difference fix IonoFree) • בעיבוד הווקטורים יש להשתמש רק בתצפיות בהן זווית הגובה אל הלוויינים גדולה מ- 12 מעלות. 24
הנחיות המדידה – עיבוד, חישוב ותאום קואורדינטות מתואמות של נקודות הבקרה המדודות במערכת הייחוס התקפה (IGD05/12) יותמרו לקואורדינאטות מישוריות ברשת התקפה (IG05/12) באמצעות פרמטרי ההתמרה הרשמיים ומשוואות המיפוי, וגובהן יומר בעזרת מודל גליות שיאשר המנהל .
הנחיות המדידה – עיבוד, חישוב ותאום ההפרש בין מערכות מדידה של נקודת בקרה חדשה לא יעלה על הערך המופיע בטבלה 3הן ברכיב האופקי והן ברכיב האנכי טבלה 3 – הפרש מותר בין מערכות מדידה
הנחיות המדידה – עיבוד, חישוב ותאום כאשר ההפרש קטן מהמותר, ערכי הקואורדינטות הסופיות של מיקום נקודת הבקרה ייקבעו כממוצע חשבוני פשוט של תוצאות שתי המערכות. כאשר ההפרש גדול מהמותר יש למדוד את נקודת הבקרה פעם אחת נוספת לפחות עד אשר השר"ב של ממוצע התצפיות לא יעלה על מחצית ההפרש המרבי המותר המצוין בטבלה 3.
שיטה 1 – מדידה ביחס ל G0 ו- S0 בשיטת מדידה זו יש לערוך את העיבוד הווקטורי ופתרון המערכות ביחס לתחנת קבע ממערך תחנות קבועות ממשלתי ו/או פרטי. בשיטת מדידה זו ניתן למדוד נקודות בדרגות: S2 , S1, 3S ו-H6 כאשר המרחק בין נקודת הבקרה החדשה (והביקורת) לתחנת הבסיס אינו עולה על15 קילומטרים. H4 ו- H5 כאשר המרחק בין נקודת הבקרה החדשה (והביקורת) לתחנת הבסיס אינו עולה על 10 קילומטרים. 60 דקות בין מערכות
שיטה 1 – מדידה ביחס ל G0 ו- S0 עבודת השדה: כאשר המרחק בין הנקודה המדודה לתחנה הקבועה אינו עולה על 10 קילומטרים משך זמן המדידה, לאחר ייצוב האנטנה על הנקודה ומדידת גובהה יהיה בהתאם לטבלה 1. כאשר המרחק בין הנקודה המדודה לתחנה הקבועה עולה על 10 קילומטרים אך קטן מ- 15 קילומטרים יש להוסיף 10 דקות פרקי הזמן המופיעים בטבלה 1. יש למדוד נקודת ביקורת עבור כל יום מדידה. על נקודת הביקורת להימצא במרחק שאינו עולה על 10/15 קילומטרים מהתחנה הקבועה ומכל נקודה חדשה שנקבעת. טבלה 1 – משך זמן המדידה המזערי למערכת מדידה
שיטה 1 – מדידה ביחס ל G0 ו- S0 עיבוד, חישוב ותאום: עיבוד הווקטורים יבוצע כאשר ערכי הקואורדינטות של התחנה הקבועה במערכת הייחוס התקפה יהיו קבועים וזהים לקואורדינטות הגאוגרפיות הרשמיות שלה. את הווקטורים מכל מערכה בנפרד יש לתאם ביחד עם המדידות הישירות בין נקודות הבקרה החדשות, אם נמדדו, במינימום אילוצים בשיטת סכום הריבועים הקטנים. בתאום זה הערכים של התחנה הקבועה יהיו קבועים וזהים לקואורדינטות הגאוגרפיות הרשמיות שלה.
שיטה 2 – מדידה ביחס לתחנה מדומה בשיטה זו ניתן למדדוד נקודות בקרה חדשות מהדרגות S1, S2, S3 ו- H6. בשיטה זו מותר השימוש בכל מקום בו ניתן לקבל קבצי VRS ממערך תחנות קבועות מאושר (ממשלתי או פרטי). יש לקבוע את נקודת ה-VRS במרחק שאינו עולה על 5 קילומטרים מנקודות הבקרה המדודות ומנקודת הביקורת. מומלץ לקבוע את מיקום ה-VRS כך שיהיה קרוב ככל הניתן לנקודות הבקרה החדשות. יש לוודא שגובה נקודת ה-VRS הינו תואם את גובה אזור העבודה. 60 דקות בין מערכות
שיטה 2 – מדידה ביחס לתחנה מדומה משך זמן המדידה לאחר ייצוב האנטנה על הנקודה ומדידת גובהה, יהיה בהתאם למפורט בטבלה 1 יש למדוד נקודת ביקורת עבור כל יום מדידה. על נקודת הביקורת להימצא במרחק שאינו עולה על 5 קילומטרים מהתחנה המדומה ומכל נקודה חדשה. טבלה 1 – משך זמן המדידה המזערי למערכת מדידה הערה: ניתן לשלב מדידה של נקודה חדשה בשיטה זו עם מדידתה בשיטה 1. במקרה זה ייקבעו ההפרש המרבי המותר ודירוג הנקודה החדשה כאילו נקבעו בשיטה זו.
שיטה 2 – מדידה ביחס לתחנה מדומה עיבוד, חישוב ותאום: עיבוד הווקטורים יבוצע כאשר ערכי הקואורדינטות של התחנה המדומה במערכת הייחוס התקפה יהיו קבועים וזהים לאלו לפיהן נוצרו מהנתונים. כל נקודה נמדדת בשתי מערכות זמן שונות. יש לעבד כל מערכה בנפרד ביחס לתחנה מדומה שונה (במרחק מינימאלי של 120 מטרים זו מזו – כ 4 שניות קשת). את הווקטורים מכל מערכת מדידה נפרדת יש לתאם ביחד עם המדידות הישירות בין הנקודות החדשות, אם נמדדו, בתאום עם אילוצים בשיטת סכום הריבועים הקטנים. בתאוםזה ערכי הקואורדינטות של כל התחנות המדומות יהיו קבועים וזהים לקואורדינטות במערכת הייחוס התקפה לפיהן נוצרו הנתונים.
שיטה 3 – מדידה ביחס לתחנת בסיס בשיטה זו, ציוד המדידה הגיאודטי מוצב מעל נקודת בקרה ידועה ומחליף את הצורך בקבלת נתוני מדידה מתחנה קבועה או ביצירת נתוני מדידה מדומים, ומשמש כנקודת בסיס. הערה: דירוג נקודות הבקרה שיכולות לשמש כנקודת בסיס בשיטה זו הינן: G1, G2 ו- S1 בלבד. (כיוון שרק להן גובה אליפסואידאלי מאושר)
שיטה 3 – מדידה ביחס לתחנת בסיס משך זמן המדידה, לאחר ייצוב האנטנה על הנקודה ומדידת גובהה, יהיה בהתאם למפורט בטבלה 1. טבלה 1 – משך זמן המדידה המזערי למערכת מדידה המרחק בין נקודת הביקורת לבין תחנת הבסיס ולבין כל נקודה חדשה שלצרכי קביעתה היא משמשת, לא יעלה על 10 קילומטר. בעת שילוב עם שיטת מדידה אחרת, המרחק אל נקודת הביקורת יהיה הקטן מבין השיטות. 35
שיטה 3 – מדידה ביחס לתחנת בסיס עיבוד, חישוב ותאום: עיבוד הווקטורים המדודים לנקודות בקרה חדשות יבוצע כאשר ערכי הקואורדינטות הגאוגרפיות של תחנת הבסיס יהיו קבועים וזהים לקואורדינטות הרשמיות שלה. כאשר מודדים נקודה חדשה ביחס אל שתי תחנות בסיס שונות תשמש אחת מנקודות הבסיס כנקודת בקרה ידועה בה הערכים שלה קבועים ורשמיים ונקודת הבקרה האחרת תשמש כנקודה לביקורת. בדיקה זו יש לבצע עבור מדידתה של נקודה חדשה אחת לפחות עבור כל יום מדידה. את הווקטורים מכל מערכה יחד עם המדידות הישירות בין הנקודות החדשות, אם נמדדו, יש לתאם בנפרד לרשת בתאום עם מינימום אילוצים בשיטת סכום הריבועים הקטנים. בתאום זה הערכים של תחנות הבסיס, יהיו קבועים וזהים לקואורדינטות הרשמיות שלה במערכת הייחוס התקפה.
שיטה 4 – רשת גיאודטית בשיטה זו נמדדת רשתהמחושבת ומתואמת במערכת הייחוס התקפה בין שתי נקודות ידועות לפחות. דרגת נקודות הבקרה החדשותתהיה נמוכה מדרגת נקודת הביסוס הנמוכה ביותר. אורך הווקטור ברשת יהיה קטן מ- 15 קילומטר כשהרשת מבוססת על נקודות מרמה G ויהיה קטן מ- 5 קילומטר בכל מקרה אחר.
שיטה 4 – רשת גיאודטית עיבוד, חישוב ותאום: לחישוב ערכי הקואורדינטות של נקודות בקרה חדשות במערכת הייחוס התקפה יבוצע עיבוד הווקטורים כאשר ערכי הקואורדינטות של נקודות הבקרה הידועות יהיו קבועים ורשמיים. תהליך התאום מתחלק לשני חלקים: א. את הווקטורים יש לתאם בתאום עם מינימום אילוצים בשיטת סכום הריבועים הקטנים, תאום בו הערכים של נקודת הבקרה ידועה אחת קבועים ורשמיים. נקודות הבקרה הידועות האחרות ישמשו לביקורת. ב. כאשר ההפרש אינו עולה על המותר, יש לחזור ולתאם את הרשת בתאום מאולץ בשיטת סכום הריבועים הקטנים, תאום בו הערכים של כל נקודות הבקרה הידועות קבועים ורשמיים. אם ההפרש, בין הקואורדינטות הגאוגרפיות האופקיות והאנכיות המתקבלות מתהליך התאום לבין אלו הידועות, עולה על המופיע בטבלה 2 יש לעכב את המשך החישוב עד לבירור מקור הטעות.
שיטה 4 – רשת גיאודטית ערכי הציר הגדול של אליפסות השגיאה של נקודות הרשת ודיוקן האנכי (ברמת מובהקות של 95%) המתקבלות מתהליך התאום לא יעלו על הערכים המופיעים בטבלה 4 כתלות בדרגת נקודות ביסוס הרשת. טבלה 4 – ערכים מרביים מותרים של הציר הגדול של אליפסות השגיאה והדיוק האנכי (95%) במ"מ של הנקודות החדשות כתלות בדרגת הבסיס 39
שיטות מדידה בזמן אמת - RTK בשיטות מדידה אלו ניתן למדוד נקודות בקרה בדרגות S2 ו-S3 בלבד. בשיטות אלו קיים מקלט אחד לפחות (או מערך של תחנות קבועות) המוצב על נקודות בקרה בעלות ערכי מיקום במערכת הייחוס התקפה. המקלט (Base), מחשב בזמן אמת תיקונים למדידות הנערכות מהלוויינים הנקלטים (בשימוש המיקום הידוע של התחנה והמיקום המחושב ע"י הלוייניים הנקלטים). תיקונים אלו מועברים אל מקלט מתנייד (Rover), בעזרתם מתבצע תיקון למדידות הלוויינים המשותפים אשר נקלטים בו בזמן בתחנת הבסיס ובמקלט המתנייד. בעזרת התיקונים / המדידות "מתוקנות" מייצרות מחושב פתרון יחסי בדיוק גבוה בזמן אמת, ביחס לתחנת הבסיס / מערך תחנות הקבע כולו.
שיטה 5 (1) – NetworkRTK העבודה ב-RTK אפשרית תוך שימוש בשרותי Network-RTK המבוססים על רשת תחנות ה- GNSS הקבועות של מפ"י (APN) או בשימוש ברשת פרטית עם קואורדינאטות מאושרות במערכת הייחוס התקפה (ומקלט נייד). ב-Network-RTK משודרים תיקונים ע"י מרכז השליטה והבקרה (משו"ב) של הרשת ומאפשרים ביצוע מדידות RTK באמצעות מקלט בודד. קבלת התיקונים המשודרים מהמשו"ב ע"י המקלט הנייד יכולה להתבצע בשלוש שיטות: א. תחנה קבועה סמוכה מרשת APN או מרשת פרטית ב. תחנת ייחוס מדומה ג. מודל תיקון אזורי (FKP)
שיטה 5 (1) – NetworkRTK שימוש בהתמרה מרחבית של שבעה פרמטרים רשמיים מאפשר לקבל את הקואורדינטות של המקלט הנייד ברשת התקפה (IG05/12) בזמן אמת. ניתן לעשות שימוש בכל אחת מאפשרויות התיקונים. באפשרות הראשונה המרחק בין המקלט הנייד לתחנה הקבועה אינו עולה על 10 ק"מ. טרם בחירת סוג התיקונים מומלץ לבדוק את אזורי הכיסוי שבהם ניתן לעבוד לפי סוג התיקונים. הנקודות החדשות ונקודות הביקורת יכולות להימדד בכל שיטת תיקונים ומומלץ אם ניתן, לבצע את אחת המדידות בשיטת תיקונים אחרת מזו שנמדדה הנקודה הראשונה
שיטה 5 (2) – BR – RTK (Base-Rover) השימוש ב BR-RTK, דורש הצבת מקלט על נקודת בקרה בעלת ערכי מיקום ידועים במערכת הייחוס התקפה. נקודות בקרה מדרגה G1, G2 ו- S1 יכולות לשמש כנקודות בסיס (Base)בשיטת מדידה זו. על נקודות בקרה אלו תיוצב האנטנה בצורה קבועה למשך כל זמן מערכת המדידה, בדומה לשיטת "תחנת בסיס" ב-Post-Processing. בכל מערכה יש למדוד את נקודת הבקרה החדשה ביחס לתחנת בסיס שונה. המרחק המזעריבין תחנות הבסיס צריך להיות 120 מטרים לפחות.
שיטה 5 (2) – BR – RTK (Base-Rover) עבודת השדה – מקלט נייד: מדידה תתבצע רק כאשר מושג פתרון מסוג FIXED. בנוסף פתרון יתקבל רק כאשר השגיאה הריבועית הבינונית (RMS) של מדידה קטנה מ- 2 ס"מ במישור אופקי ו-4 ס"מ בגובה. יש להכניס למחשב הבקרה ערכים אלו כערכי סף ובכך ייקבע הפתרון מסוג FIXED רק עבור מדידות אשר שגיאתם הריבועית קטנה מערכי הסף. משך זמן המדידה, לאחר ייצוב האנטנה על הנקודה ומדידת גובהה, יהיה לפחות 3 דקות בקצב מדידה של שנייה אחת עבור מדידת נקודות מדרגה S2(180 מדידות תקינות) ו-2 דקות בקצב מדידה של שנייה אחת עבור מדידת נקודות מדרגה S3 (120 מדידול תקינות). המדידה תורכב ממוצע כל התצפיות. יש לשמור את המדידה רק כאשר היא עמדה בדרישות הדיוק שהוכנסו למערכת.
שיטה 5 (2) – BR – RTK (Base-Rover) עבודת השדה – מקלט נייד: יש למדוד נקודת ביקורת בתחילת יום עבודה ובסיומו. בין נקודות הביקורת בתחילת העבודה ובסיומה יש לכבות את המקלט הנייד ומערכת התקשורת ולאתחל אותם מחדש. על נקודת הביקורת להיות במרחק שאינו עולה על 10 ק"מ מכל הנקודות הנמדדות. המרחק המירבי המותר של נקודה מדודה ממקלט הבסיס יהיה קטן מ-2 ק"מ כאשר מקלט הבסיס מוצב מעל נקודה מדרגה S1 וקטן מ-10 ק"מ כאשר מקלט הבסיס מוצב מעל נקודה מדרגה S0 G2 או .G1
תודה רבה על ההקשבה .