Download
1 / 7
80 likes | 282 Views
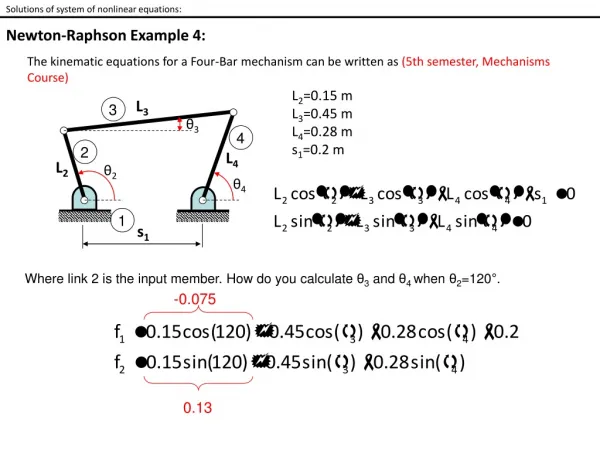
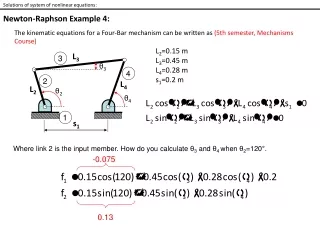
Solutions of system of nonlinear equations:. L 3. θ 3. L 4. L 2. θ 2. θ 4. s 1. 1. 4. 2. 3. Newton-Raphson Example 4:. The kinematic equations for a Four-Bar mechanism can be written as (5th semester, Mechanisms Course). L 2 =0.15 m L 3 =0.45 m L 4 =0.28 m s 1 =0.2 m.

E N D
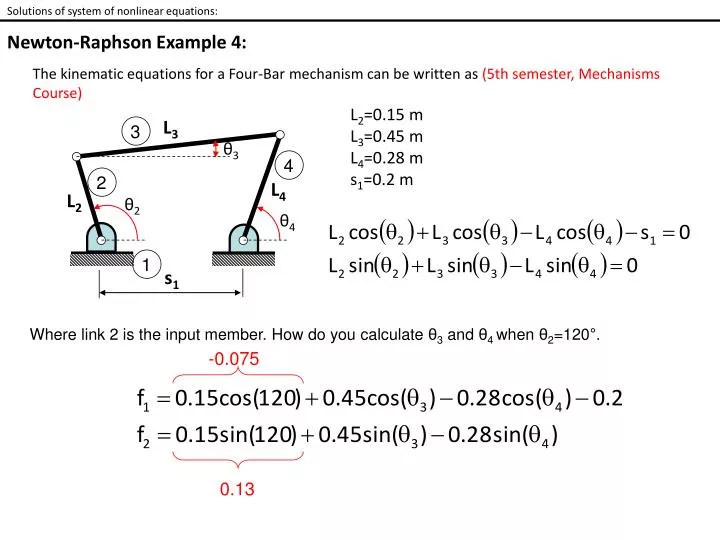
Solutions of system of nonlinear equations: L3 θ3 L4 L2 θ2 θ4 s1 1 4 2 3 Newton-Raphson Example 4: The kinematic equations for a Four-Bar mechanism can be written as (5th semester, Mechanisms Course) L2=0.15 mL3=0.45 mL4=0.28 ms1=0.2 m Where link 2 is the input member. How do you calculate θ3 and θ4 when θ2=120°. -0.075 0.13
Solutions of system of nonlinear equations: Solution with MATLAB clc;clear [x,y]=solve('0.45*cos(x)-0.28*cos(y)=0.275','0.13+0.45*sin(x)-0.28*sin(y)=0'); vpa(x,6) vpa(y,6) Following changes are made in the computer program. • Sub newtonrn_Click() • - - - • 40 n=2 • 41 xb(1)=0.5:xb(2)=1:xh(1)=.001:xh(2)=.001 • - - • 45 ‘…Error equations… • a(1,1)=-0.45*Sin(xb(1)):a(1,2)=0.28*Sin(xb(2)) • a(2,1)=0.45*Cos(xb(1)):a(2,2)=-0.28*Cos(xb(2)) • b(1)=-(0.45*Cos(xb(1))-0.28*cos(xb(2))-0.275) • b(2)=-(0.13+0.45*Sin(xb(1))-0.28*Sin(xb(2))) • 46 ‘... • - - • End sub (Initial angle values must be given in RADIAN) ANSWER: θ3=0.216 rad (12.37°) θ4=0.942 rad (53.97°)
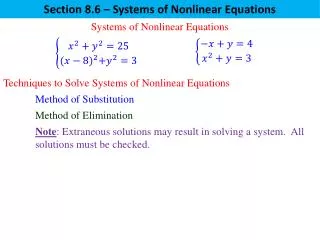
Solutions of system of nonlinear equations: Newton-Raphson Example 5: Kinematic equations for a crank mechanism are given below (5th semester Mechanisms Course) L2=0.15 mL3=0.6 m θ3 L2 L3 θ2 s Where link 2 (crank) is the input member. How dou you calculate θ3 and s with computer when θ2=60°. 0.075 0.1299
Solutions of system of nonlinear equations: Following changes are made in the computer program. • Sub newtonrn_Click() • - - - • 40 n=2 • 41 xb(1)=-1:xb(2)=0.8:xh(1)=.001:xh(2)=.001 • - - • 45 ‘…Error equations… • a(1,1)=-0.6*Sin(xb(1)):a(1,2)=-1 • a(2,1)=0.6*Cos(xb(1)):a(2,2)=0 • b(1)=-(0.075+0.6*Cos(xb(1))-xb(2)) • b(2)=-(0.1299+0.6*Sin(xb(1))) • 46 ‘... • - - • End sub ANSWER: θ3=-0.2182 rad (-12.5°) s=0.6607 m Solution with MATLAB clc;clear [x,y]=solve('0.075+0.6*cos(x)-y=0','0.1299+0.6*sin(x)=0'); vpa(x,6) vpa(y,6)
Solutions of system of nonlinear equations: Solution with MATLAB clc;clear t=solve('t^3-t^2-4*t+3=0'); vpa(t,6) Newton-Raphson Example 6: The time-dependent locations of two cars denoted by A and B are given as At which time t, two cars meet? Sub newtonr1_Click () ' CHANGE LINES 30, 35 AND 37 FOR DIFFERENT PROBLEMS 30 x = 1: AERROR = .0001 niter1 = 5: niter2 = 20: ir = 0: Call cls1 32 xp = x 35 f = x ^ 3 - x ^ 2 - 4 * x + 3 37 f1 = 3 * x ^ 2 - 2 * x - 4 … End Sub ANSWER T=0.713 s t=2.198 s Using roots command in MATLAB a=[ 1 -1 -4 3];roots(a)
Graph Plotting: Given: z=0.36 ω0=24*2*π (rad/s) A=1.2 Φ=-42*π/180 (rad)=-0.73 rad ω ω0=150.796 rad/s α -σ Graph Plotting Example 7: From a vibration measurement on a machine, the damping ratio and undamped vibration frequency are calculated as 0.36 and 24 Hz, respectively. Vibration magnitude is 1.2 and phase angle is -42o. Write the MATLAB code to plot the graph of the vibration signal.
Graph Plotting: clc;clear t=0:0.002:0.1155; yt=1.2*exp(-54.3*t).*cos(140.7*t+0.73); plot(t,yt) xlabel(‘Time (s)'); ylabel(‘Displacement (mm)');