Download
1 / 5
50 likes | 140 Views
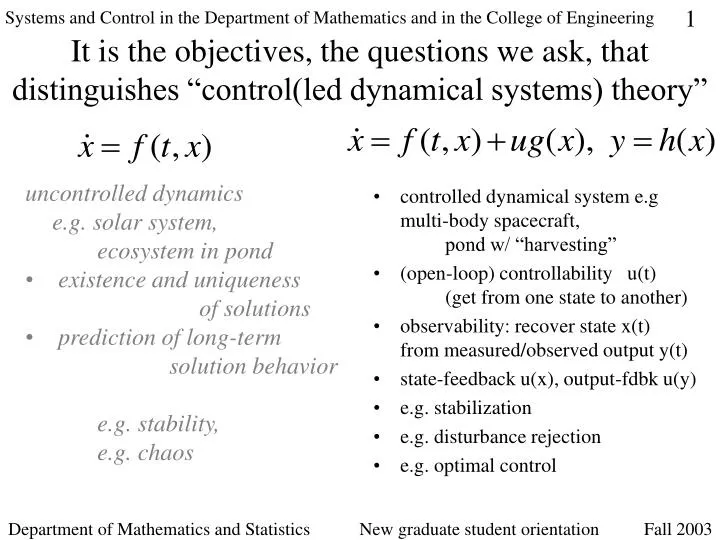
controlled dynamical system e.g multi-body spacecraft, pond w/ “harvesting” (open-loop) controllability u(t) (get from one state to another) observability: recover state x(t) from measured/observed output y(t) state-feedback u(x), output-fdbk u(y) e.g. stabilization

E N D
controlled dynamical system e.g multi-body spacecraft, pond w/ “harvesting” (open-loop) controllability u(t) (get from one state to another) observability: recover state x(t) from measured/observed output y(t) state-feedback u(x), output-fdbk u(y) e.g. stabilization e.g. disturbance rejection e.g. optimal control uncontrolled dynamics e.g. solar system, ecosystem in pond existence and uniqueness of solutions prediction of long-term solution behavior e.g. stability, e.g. chaos It is the objectives, the questions we ask, that distinguishes “control(led dynamical systems) theory”
Diverse models, diverse mathematics tools • Continuous time (DEs) discrete time (difference eqns) • Finite state-space (automata) finite dimensional (systems of ODEs) infinite dimensional (systems of PDEs) • Deterministic stochastic • Linear nonlinear nonsmooth • . . . . • Common themes / questions / objectives, but diverse mathematics toolsflexible coursework (incl. many options in CEAS)
Faculty • Tom Taylor (Harvard, ASU since 1983) • Peter Crouch (Harvard, ASU since 1984, dean CEAS) • Matt Kawski (Colorado, ASU since 1987) • Sergei Nikitin (Moscow, ASU since 1994) • Collaboration in math. w/ e.g.dynamical systemsDieter Armbruster, Eric Kostelich, Hal Smith, … • Collaboration w/ many engineering departmentsDan Riviera (ChemE), Gary Yamaguchi (BioMedE)Toni Rodriguez (EE), Kostas Tsakalis (EE), … …
Traditional strengths, current initiatives at ASU • “differential geometric” (TT, PC, MK, SN)finite dimensional / deterministic / continuous time / nonlinear seminar “Geometry and Dynamical Systems” (PC,MK) • “modeling” (TT) of group-behavior and decision making:w/ biologists, psychologists and computer scientists; long range goals include the control of crowd behavior in panic situations • “stochastic” (TT)Bayesian estimation; model construction and validation for nonlinear dynamical systems. Goals include effective prediction of future based on learning from past, e.g. climate, markets • “manufacturing systems and supply chains” (DA, CR, DR, MK, Intel)modeling, analysis, control – “competition of models and approaches”
Why study control ? • Intellectual challenge: • inverse questions, “don’t just watch & predict,but instead take planned action so that … happens” • Very lively area at the intersection of pure math with many engineering applications • Active and well-supported at ASU; by NSF, DoD, DoE, … • Meshes w/ interest in diverse mathematical areas • Keep your options open!!! • career in academia, pure sciences, or • “real job” in industrial, business, governmental… applications