Download
1 / 42
420 likes | 582 Views
Answering Distance Queries in directed graphs using fast matrix multiplication. Seminar in Algorithms Prof. Haim Kaplan Lecture by Lior Eldar 1/07/2007. Structure of Lecture. Introduction & History Alg1 – APSP Alg2 – preprocess & query Alg3 – Hybrid Summary. Problem Definition.

E N D
Answering Distance Queries in directed graphs using fast matrix multiplication Seminar in Algorithms Prof. Haim Kaplan Lecture by Lior Eldar 1/07/2007
Structure of Lecture • Introduction & History • Alg1 – APSP • Alg2 – preprocess & query • Alg3 – Hybrid • Summary
Problem Definition • Given a weighted directed graph, we are requested to find: • APSP - All pairs shortest paths – find for any pair • SSSP - Single Source shortest paths – find all distances from s. • A hybrid problem comes to mind: • Preprocess the graph faster than APSP • Answer ANY two-node distance query faster than SSSP. • What’s it good for?
Previously known results – APSP • Undirected graphs • Approximated algorithm by Thorup and Zwick: • Preprocess undirected weighted graph in expected time. • Generate data structure of size • Answer any query in O(1) • BUT: answer is approximate with a factor of 2k-1. • For non-negative integer weights at most M – Shoshan and Zwick developed an algorithm of run time • Directed graphs – Zwick - runs in
Previously known results - SSSP • Positive weights: • Directed graphs with positive weights – Dijkstra with • Undirected graphs with positive integer edge weights – Thorup with • Negative weights – much harder: • Bellman-Ford • Goldberg and Tarjan – assumes edge weight values are at least – N.
New Algorithm by Yuster / Zwick • Solves the hybrid pre-processing-query problem for: • Directed graphs • Integer weights from –M to M • Achieves the following performance: • Pre-processing • Query answering – O(n) • Faster than previously known APSP (Zwick) so long as the number of queries is • Better than SSSP performance (Goldberg&Tarjan) for dense graphs with small alphabet – gap of
Beyond the numbers… • An extension of this algorithm allows complete freedom in optimization of the pre-processing - query problem. • to optimize an algorithm for an arbitrary number of queries q, we want: preprocessing time + q * query time to be minimal. • This defines the ratio between query time and pre-processing time - completely controlled by the algorithm inputs. • Meaning: if we know in advance the number of queries we can fine-tune the algorithm as we wish.
Before we begin - scope • Assumptions: • No negative cycles • Inputs: • Directed Weighted Graph G=(V,E,w) • Weights are –M,…0,…,M • Outputs: • Data structure such that – given any two nodes – produces the shortest distance between them (and not the path itself) – with high probability.
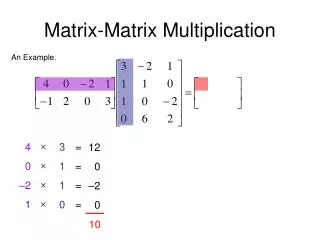
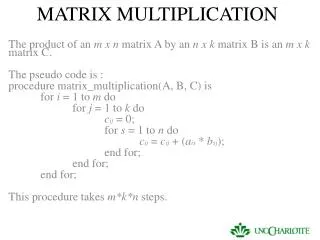
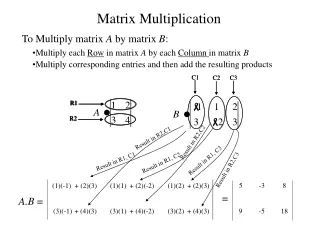
Matrix Multiplication • The matrix product C=AB, where A is an matrix, B is , and C is matrix, is defined as follows: • Define: the minimal number of algebraic operations for computing the matrix product. • Define as the smallest exponent such that • Theorem by Coppersmith and Winograd:
Distance Products • The distance product , where A is an matrix, B is , and C is matrix, is defined as follows: • Recall: if W is an n x n matrix of the edge weights of a graph then is the distance matrix of the graph. • Lemma by Alon: can be computed almost as fast as “regular” matrix multiplication:
State-of-the-art APSP • Randomized algorithm by Zwick that runs in time • Intuition: • Computation of all short paths is intensive. • BUT: long paths are made up of short paths: once we pay the initial price we can leverage this work to compute longer paths with less effort. • Strategy: Giving up on certainty - with a small number of distance updates we can be almost sure that any long-enough path has at least one representative that is updated.
Basic Operations • Truncation • Replace any entry larger than t with • Selection • Extract from D the elements whose row indices are in A, and column indices are in B. • Min-Assignment • Assign to each element the smallest between the two corresponding elements of D and D‘.
Pseudo-code • Simply sample nodes and multiply decimated matrices…
On matrices and nodes… • Column-decimated matrix Distance between any two nodes D Shortest directed path from any node to any node in B
On matrices and nodes…(2) • Row-decimated matrix Distance between any two nodes Shortest directed path from any node in B to any node
What do we prove? • Lemma: if there is a shortest path between nodes i and j in G that uses at most edges, then after the -th iteration of the algorithm, with high probability we have • Meaning: at each iteration we update with high probability all the paths in the graph of a certain length. This serves as a basis for the next iteration.
Proof Outline • By Induction: • Base case: easy – the input W contains all paths of length • Induction step: • Suppose that the claim holds for and show that it also holds for • Take any two nodes that their shortest distance is at least . The -th iteration matrix product will (almost certainly) plug in their shortest distance at location (i,j) of D.
i k j’ j i’ Why? • Set • The path p from i to j is at least 2s/3. • This divides p into three subsections: • Left – at most s/3 • Right – at most s/3 • Middle – exactly s/3
The Details • The left and right “thirds” - help attain the induction step. • The path p(i,k) and p(k,j) are short enough – at most 2s/3 good for previous step: • The middle “third” – ensures the fault probability is low enough. • Prob(no k is selected) = • Probability still goes to 0 (as n tends to infinity) after computation of • entries • iterations
So… • Assuming all previous steps were good enough: • With high probability each long-enough path has a representative in B • The update of the D using the product plugs in the correct result. • Note that: • Each element is first limited to s*M • This is necessary for the fast-matrix-multiplication algorithm
Complexity • Where does the trick hide? • The matrix alphabet increases linearly with iteration number • The product size decreases with iteration number • For each iteration : • Alphabet size: s*M • Product complexity: , where • Total: • Disregarding the log function, and optimizing between fast and naïve matrix products we get:
Fast Product versus Naive *assuming small M
Complexity Behavior • For a given matrix alphabet M, we find the cross-over point between the matrix algorithms. • For high r (>M-dependent threshold) we use FMM • Complexity dependent on M • For low r (<threshold) we use naïve multiplication • Complexity not dependent on M • Q: How does complexity change over the iteration number?
Pre-processing algorithm • Motivation: • We rarely query all node-pairs • Strategy: • Replace the costly matrix product with 2 smaller products: • Generate data structure such that each query costs only
Starting with the query… • Pseudo-code: • What is a sufficient trait of D, such that the returned value will be, with high probability • Answer: with high probability, a node k on the path from i to j should have:
New matrix type • Row&Column-decimated matrix Query data structure for any two nodes D Query data-structure for any 2 nodes in B
What do we prove? • Lemma 4.1: If or , and there is a shortest path from i to j in G that uses at most edges, then after the -th iteration of the preprocessing algorithm, with high probability we have . • Meaning: D has the necessary trait: for any path p, if we iterate long enough, then with high probability, for at least one node k (in p(i,j)) the entries d(i,k), d(k,j) will contain shortest paths. Hence, “query” will return the correct result.
Proof Outline - preprocess • By Induction: • Base case: easy – B=V, and the input W contains all paths of length . • Induction step: • Suppose that the claim holds for and show that it also holds for • Take any two nodes that their shortest distance is at most . The l-th iteration matrix products (2) will (almost certainly) plug in their shortest distance at location (i,j) of D provided that EITHER or .
i k j’ j i’ Why? • Set • The path p from i to j is at least 2s/3. • This divides p into three subsections: • Left – at most s/3 • Right – at most s/3 • Middle – exactly s/3
The Details • Assume that . • With high probability ( ) there will be k in p(i,j), such that (remember why?) • Both are also in ,since • We therefore attain the induction step: • The path p(i,k) and p(k,j) are short enough – at most 2s/3 good for previous step. • The end-points of these paths (k) are in • Therefore their shortest distance is in D • The second product then updates correctly. (assumption critical here)
Where’s the catch? • In APSP, we assure that: • At every iteration l we compute the shortest path of length at most . • BUT: we had to update all pairs each time • In the preprocess algorithm, we assure: • At every iteration l, we compute the shortest path of length at most only for a selected subset. • BUT: this subset covers all possible subsequent queries, with high probability.
Complexity • Matrix product: instead of operations we only get • As before, for each iteration , the alphabet size is s*M. • Total complexity: • No matrix-product switch here!
Performance • For small M, as long as the number of queries is less than we get better results than APSP. • For small M: • The algorithm overtakes Goldberg’s algorithm, if the graph is dense • For a dense-enough graph , we can run many SSSP queries and still be faster:
The larger picture • We saw: • Alg1: heavy pre-processing, light query • Alg2: light pre-processing, heavy query • Alg3: ? Query-oriented (APSP) Preprocess- oriented (pre-process)
The Third Way • Suppose we know in advance the we require no more than queries. • We use the following: • Perform iterations of the APSP algorithm • Perform iterations of the pre-process algorithm • Take the matrix B from the last step of step 1. The product returns in any shortest-distance query.
Huh? • After the first stage D holds all the shortest path of all “short” paths, of lengths at most with high probability. • When the second starts stage it can be sure that the induction holds for all • The second stage takes care of the “long” paths, with respect to querying. Meaning: • If the path is long it will have a representative in one of the second-phase iterations • If it is too-short – it will fall under the jurisdiction of the first stage.
Complexity • The first stage ( updates) costs at most • The second stage costs only • The query costs • For example – if want to answer a distance query in , we can pre-process in time
Q&A (I ask - you answer) • Q: Why couldn’t we sample B in the query step of Alg2 – the one that initially costs O(n)? • A: Because if the path is too short – we will have no guarantee that it will have a representative in B. Alg3 solves this because short distances are computed rigorously. • Conclusion: the less we sample out of V when we query, the more steps we need to run APSP to begin with.
Final Procedure • Given q queries, determine the query complexity using . • This assumes M is small enough so that we use fast product. Otherwise compare to • Execute alg3 using steps of APSP and steps of pre-process • Query all q queries.
Summary • For the problem we defined: directed graph, with integer weights, whose absolute value is at most M, we have seen: • Alg1: State-of-the-art APSP in • Alg2: State-of-the-art SSSP in • Alg3: A method to calibrate between the two, for a known number of queries.