Download
1 / 1
10 likes | 178 Views
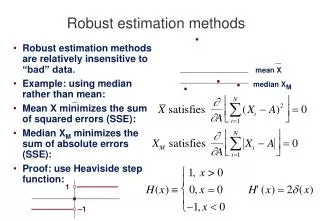
Using Robust Estimation for Visual Servoing Based on Dynamic Vision. Christophe Collewet and François Chaumette INRIA/IRISA, Campus de Beaulieu, Rennes, France. Accurate camera positioning tasks wrt objects of unknown shape

E N D
Using Robust Estimation for Visual Servoing Based on Dynamic Vision Christophe Collewet and François ChaumetteINRIA/IRISA, Campus de Beaulieu, Rennes, France • Accurate camera positioning tasks wrt objects of unknown shape • Unified 2D motion model to cope as well with planar as with non planar objects • Use of robust estimation to enlarge the validity domain of the 2D motion model / Comparison with active vision • Positioning tasks for any desired orientation of the camera Position after servoing