Download
1 / 21
210 likes | 429 Views
University Of West Georgia Department of Computer Science. Robot Review & Construction Meeting. ACM West Georgia Student Chapter.

E N D
University Of West GeorgiaDepartment of Computer Science Robot Review & Construction Meeting ACM West Georgia Student Chapter
We will be attending Robot Battles 40 January 21-23 in Chattanooga at Chattacon 36. Travel and lodging will be provided by the school, along with entrance into Chattacon. For safety reasons attendees must be 21 Years or older. You must fulfill your selected roles to be able to attend the event. This project will involve working with dangerous tools. Safety is paramount at all times. If you have questions do not hesitate to ask for help. We are building a killer robot, both killer as in bad ass, and killer as in Extremely Dangerous. Never operate twisty with the blade attached unless authorized to do so. Never operate any tools without the property safety equipment. Read This Twice! There will be a quiz on this at the end of the slide
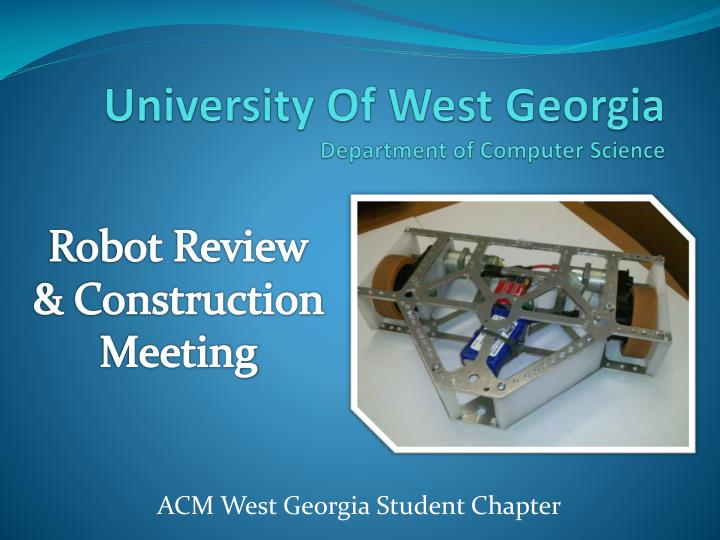
Twisty • Weight: 3lb • Current Weapon: Sumo • TX: Arduino & Wii Classic Controller • RX: Arduino • ESC: Sabertooth 10A Dual Speed Controller
DriveTrain • 2 Banebots 28:1 6mm Motors • Timing Pulleys set with a rough gear ratio of 4:1 • Speed to the Wheels: Roughly 6 mph • Mounting Hardware to attach hubs and timing pulleys to axels • Set Screws • 1/8” Key
Weapon • .5lb 7075 aluminum bar • Speed: 2500 RPM • Joules: 50 @ 2500 RPM • Powered by Axi 2808 @ 7.4v • Timing pulley 3:1 ratio Keep it slow and keep it heavy, We want a good bite and lots of force. Twisty was originally Designed for the 3lb weight class as a horizontal spinner
Frame Materials • Aluminum 7075 1/8” Thick • Exceptionally strong, lightweight, aircraft alloy. Easy to machine and decently priced. • UHMW Polyethylene pillow blocks 3/8” thick • Brinnell Rating: Unbreakable • Lightweight
Electronics • “Brains”: Arduino Nano Pro • Drivetrain speed controller : Sabertooth speed controller • Weapon speed controller: Patriot ESC • Battery: LiPo * These are Dangerous, Follow proper charging and handling procedures • Wireless Communication: XBEE Modules
ESC <-> Arduino • ESC’s accept PPM values between 1000 & 2000us • Sabertooth Brushed Motor Controller • 1000us Full Reverse • 1500us Full Stop • 2000 Full Forward • Brushless Axi Motor Controller • 1000us Full Stop *EXTREMELY IMPORTANT • 2000us Full Forward • Arduino servo.writeMillis(1000);
Wireless XBEE Communication • AT or API mode • 300 Feet Max Range • AT Mode • Raw data transfer over serial • Requires custom buffer checks • API • Successful Transfer Checks • Craft Custom Packets
Controller • Receiving XBEE • Hooked to Arduino • Arduino Interfaced with Wii Classic Controller over I2C • Classic Controller • Poor Joystick Resolution
Tasks • Update to more efficient controlling system • Upgrade Armor for new weight class • Redesign Weapon System to accommodate new weight class • Redesign Frame to accommodate for new weight class • Pre-Match Checklist & Pre-Competition Checklist • Create a Testing Arena • Practice Driving • Document
Control System – Think Unconventional! • Effective Use of ESC input values • Ideally control resolution of 211 • Possible Controllers • 360 Controller Using C# and XNA • Hacked Atari Controller - Arduino • Wii Balance Board - C# • Experiment with single stick driving • AI Control • Robot Vision, IR / Ultrasonic Sensor, Proximity Sensor
Armor • Ultra-High Molecular Weight Polyethylene (UHMW) All the way! • Rugged • Impact Resistant • A pain to machine • Purpose: Encase the electronics
Weapon • Choose Blade Material • The heavier the more energy stored • Dimensions • Speed based on weight and shape • Type • Drum • Horizontal Spinner • Backup Blades • Attach to axel
Redesign Frame Concepts To Consider • Type of material • Thickness • Space for electronics • Time to mill ~ 1 Month
Checklists • PreCompetition Checklists • Better organized and ready with spare parts and needed tools • PreMatch Checklists • Ensure Robot is ready to compete, no loose screws, no controller issues
Practice Driving • Everyone will be able to drive the bot so everyone will need to practice driving! • Fights against non moving enemies • Practice in Mock Arena late November • Fight against cheap r/c cars with extra armor • Experiment with different controlling schemes
The robot design process must be fully documented. • Building the bot must be repeatable! • All steps need to be documented to accommodate individuals with no prior robot building experience. • We can assume some programming experience • Upload to Moodle under Brandon’s Robot Project. We will set up a new area soon. • Use Version Control for software development
Proposed Project Milestones • RX Code & Frame Redesign – Oct 27th • Weapon Redesign & Armor Upgrades – Nov 10th • Mock Arena Build – Nov 12th - 15th • Checklists – Nov 24th
Follow Up Meetings • We will need to meet occasionally to discuss progress and any problems that may arise. • Most information can be discussed during the regular ACM meetings • Expect to meet again October 13th to discuss finalized roles and things you will need to start working on these roles.
That’s It! Thank you Again For Your Time!