Download
1 / 36
360 likes | 490 Views
Comparing Min-Cost and Min-Power Connectivity Problems. Guy Kortsarz Rutgers University, Camden, NJ. Motivation-Wireless Networks. Nodes in the network correspond to transmitters More power larger transmission range transmitting to distance r requires r power, 2 r 4

E N D
Comparing Min-Cost and Min-Power Connectivity Problems Guy Kortsarz Rutgers University, Camden, NJ
Motivation-Wireless Networks • Nodes in the network correspond to transmitters • More power larger transmission range transmitting to distance r requires rpower, 2 r 4 • Transmission range = disk centered at the node • Battery operated power conservation critical Type of problems: Find min-power range assignment so that the resulting communication network satisfies prescribed properties.
Directed Networks • Define costs c(e) that takes already into account the dependence on the distance . The cost c(e), e = (u,v) would be r with r the distance and the appropriate . • In general, power to send from u to v not the same as v to u • Thus power of v in directed graphs: pE'(v)=Max{eE' leaves v}{c(e)} • For example: If no edge leaves v, p(v)=0 • pE'( G)=∑vpE'(v)
Symmetric Networks • Networks where the cost to send from u to v or vise-versa is the same • Thus graph undirected and: pE'(v)=Max{eE' touching v}{c(e)} • Many classical problems can and have been studied with respect to the (more difficult) min-power model
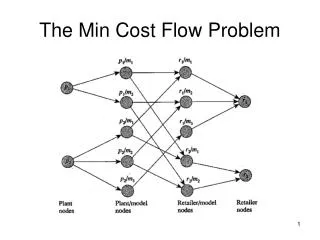
e e d d f f c c g g b b a a Range assignment Communication network
EXAMPLE UNIT COSTS c(G) = n p(G) = 1 c(G) = n p(G) = n + 1
Why Not Complete Network? b 3 4 c a 6 a is not directly connected to c. Total power is 25
Example p(a) = 7, p(b) = 7, p(c) = 9, etc. b 7 a f 5 4 2 h 8 5 8 6 9 c d 3 g
Requirements • Resilience to node-failures (node- connectivity problems) • In the most general case: requirement r (u, v) for every u, v V • r (u, v) = 7 means 7 vertex disjoint paths from u to v are required Edge-disjointness not very relevant
The Steiner Network Problem Vertex Version • Input:G ( V, E ), costs c(e) for every edgeeE requirements r(u,v) for every u,vV • Required: A subgraph G′ ( V, E′ ) of G so that G′ has r(u,v)vertex disjoint uv-paths for all u,vV • Usual Goal: Mnimize the cost, • Alternative Goal: Minimize the power
Example r(u, v)= 2 b a c
Previous Work on Steiner Network • The edge + sum version admits 2 approximation. [Jain, 1998]. The algorithm of Jain: Every BFS has an entry of value at least ½. Hence, iterative rounding • The min-cost Steiner network problem vertex version admits no ratio approximation unless NP DTIME(npolylog n) , [Kortsarz, Krauthgamer and Lee, 2002] • The result is based on 1R2P with projection property
The Vertex k - Connectivity Problem • We are given an integer k • The goal is to make the graph resilient to at most k-1 station crashes • Design a min-power (min-cost) subgraph G(V, E) so that every u,vV admits at least k vertex-disjoint paths from u to v
Previous Work for Min-Power Vertex k - Connectivity • Min-Power 2 Vertex-connectivity, heurisitic study [Ramanathan, Rosales-Hain, 2000] • 11/3 approximation for k=2 (see easy 4 ratio later) [Kortsarz, Mirrokni, Nutov, Tsano, 2006] • O(k) approximation [M. Bahramgiri, M. Hajiaghayi and V. Mirrokni, 2002], [M. Hajiaghayi, N. Immorlica, V. Mirrokni 2003]
Recent Result • Kortsarz, Mirrokni, Nutov, Tsano show that the vertex k-connectivity problem is ″almost″ equivalent with respect to approximation for cost and power (somewhat surprising) • In all other problem variants almost, the two problems behave quite differently • Based on a paper by [M. Hajiaghayi, G. Kortsarz, V. Mirrokni and Z. Nutov, IPCO 2005]
Comparing Power And Cost Spanning Tree Case • The case k = 1 is the spanning tree case • Hence the min-cost version is the minimum spanning tree problem • Min-power network: even this simple case is NP-hard [Clementi, Penna, Silvestri, 2000] • Best known approximation ratio: 5/3 [E. Althaus, G. Calinescu, S.Prasad, N. Tchervensky, A. Zelikovsky, 2004]
The case k=1: spanning tree • The minimum cost spanning tree is a ratio 2 approximation for min-power. • Due to: L. M. Kerousis, E. Kranakis, D. Krizank and A. Pelc, 2003
Spanning Tree (cont’) • c(T) p(T): • Assign the parent edge ev to v • Clearly, p(v) c(ev) • Taking the sum, the claim follows • p(G) 2c(G) (on any graph): • Assign to v its power edge ev • Every edge is assigned at most twice • The cost is at least • The power is at exactly
Relating the Min-Power and Min-Cost k - Connectivity Problems • An Edge eG is critical for k vertex-connectivity if G-e is not k vertex-connected • Theorem (Mader): In a cycle with every edge is critical there exists at least one vertex of degree k
Reduction to a Forest Solution Say that we know how to approximate by ratio the following problem: The Min-Power Edge-Multicover problem: Input:G(V, E), c(e), degree requirements r(v) for every vV Required: A subgraph G(V, E) of minimum power so that degG(v)r(v) Remark: polynomial problem for cost version
Reduction to Forest (cont’) • Clearly, the power of a min-power Edge-Multicover solution for r(v) = k-1 for every v is a lower bound on the optimum min-power k-connected graph • Hence at cost at most opt we may start with minimum degree k -1
Reduction to Forest (cont’) • Let H be any feasible solution for the Edge-Multicover problem with r(v) = k-1 for all v • Claim: Let G = H + F with F any minimal augmentation of H into a k vertex-connected subgraph. Then F is a forest
Reduction to Forest (cont’) Proof: • Say that F has a cycle. • Consider a cycle C in F • All the edges of C are critical in H + F • By Mader’s theorem there must be a vertex v in the cycle with degree k • But H(C) = k - 1, thus (H+F)(C)k+1, contradiction
Comparing the Cost and the Power • Theorem: If MCKK admits an approximation then MPKK admits + 2 approximation. • Similarly: approximation for min-power k-connectivity gives + approximation for min-cost k - connectivity [M. Hajiaghayi, G. Kortsarz, V. Mirrokni and Z. Nutov, 2005] • Proof: Start with a βapproximation H for the min-power vertex r(v) = k-1 cover problem • Apply the best min-cost approximation to turn H to a minimumcost vertex k - connected subgraph H + F, F minimal
Comparing the Cost and the Power (cont’) • Since F is minimal, by Mader’s theorem F is a forest • Let F* be the optimum augmentation. Then the following inequalities hold: 1) c(F) c(F*) (this holds because approximation) 2) p(F) 2c(F) (always true) 3) c(F*) p(F*) (F* is a forest); 4) p(F) 2c(F) 2c(F*) 2 p(F*) QED
Best Results Known for Min-Cost Vertex k - Connectivity • Simple k-ratio approximation [G. Kortsarz, Z Nutov, 2000] • Undirected graphs, k (n/6)1/2, O(log n) approximation [J. Cheriyan, A.Vetta and S.Vempala, 2002] • For any k (directed graphs as well): O(n/(n - k))log2k [G. Kortsarz and Z. Nutov, 2004] • For k = n - o(n), k1/2 [G. Kortsarz and Z. Nutov, 2004]
Approximating the Min-Power Edge - Multicover Problem and Related Variants • Example: some versions may be difficult. • Say that we are given a budget k and all requirements are at least k - 1. All edge costs are 1. • Required: a subgraph of power at most k that meets the maximum requirement possible.
Approximating the Min-Power Edge- Multiover Problem (cont’) • The problem resulting is the densest k-subgraph problem • Best known ratio: n1/3 - for about 1/60 [U. Feige, G. Kortsarz and D. Peleg, 1996]
Approximating Edge-Multicover • Very hard technical difficulty: Any edge adds power to both sides. • Because of that: take k best edges, ratio k • Usefull first reduction: 3 a b c’’ d’’ a’’ b’’ 6 6 6 8 8 5 3 8 3 d 5 c 5 d’ a’ b’ C’
An Overview • Hence assume input B(X,Y,E) bipartite. Only Y have demands. • However: bothX and Y have costs • Assume opt is known • Main idea: Find F so that: pF(V) 3opt rF(B) (1 - 1/e) r(B) / 2 • Clearly, this implies O(log n) ratio as r(B)=O(n2)
Reduction to a Special Variant of the Max-Coverage Problem • Let R = r(Y) • The edge e = (x,y) is dangerous if cost(e) 2optr(y)/R; • A dangerous edge requires more than twice “its share” of the cost • Dangerous edges can be “ignored”; They cover at most half the demand. Thus
The Cost Incurred by Non-Dangerous Edges • Since no dangerous edges used the cost is at most • Hence, focus on non-dangerous edges because even if every yY is touched by its heaviest (non-dangerous) edge the total cost on the Y side is O(opt). • Only try to minimize the cost invoked at X • This is reducible to a generalization of set-coverage
The Max-CoverageProblem With Group Budget Constrains Select at most one of the following sets: 2 5 7 1 1 2 5 7 1 1 1 2 5 2 C=1 C=2 C=7 C=5
Approximating Set-Coverage with Group Budget Constrains • We reduced to a problem similar to the max-coverage algorithm • However, we have group constrains: sets are split into groups. At most one set can be selected of every group • Can be approximated within (1-1/e) By pipage rounding [Ageev,Sviridenko 2000] • Invest opt, cover (1-1/e)/2 of the demand • O(log n) ratio approximation
Remarks • Only Max-SNP hardness is known for min-power edge-coverage • For general rij only 4rmax upper bound is known, [KMNT] • The edge case admits n1/2 approximation [HKMN] • Directed variants: even k edge-disjoint path from x to y1R2p Hard [KMNT]
Open Problems • The case r(u,v) {0, 1}. We recently broke the obvious ratio 4 (any solution is a forest so use ratio 2 for min-cost to get 22=4). Our ratio is 11/3. What is the best ratio? • Does min-cost (min-power) vertex k-connectivity admit (log n) lower bound? This problem related to deep concepts in graphs known as critical graphs • Does the min-power edge-multicover problem admit an (log n) lower bound? • Can we give polylog for k vertex-connectivity directed graphs?