Download
1 / 18
180 likes | 299 Views
Organizing Optic Flow. Cmput 610 Martin Jagersand. Last lecture: Questions to think about. Compare the methods in the paper and lecture Any major differences? How dense flow can be estimated (how many flow vectore/area unit)? How dense in time do we need to sample?.

E N D
Organizing Optic Flow Cmput 610 Martin Jagersand
Last lecture:Questions to think about Compare the methods in the paper and lecture • Any major differences? • How dense flow can be estimated (how many flow vectore/area unit)? • How dense in time do we need to sample?
Organizing different kinds of motion Two examples: • Greg Hager paper: Planar motion • Mike Black, et al: Attempt to find a low dimensional subspace for complex motion
Remember last lecture: • Over determined equation system Im = Mu • Can be solved in e.g. least squares sense using matlab u = M\Im
3-6D Optic flow • Generalize to many freedooms (DOFs) Im = Mu
Know what type of motion(Greg Hager, Peter Belhumeur) u’i = A ui + d Planar Object => Affine motion model: It = g(pt, I0)
Mathematical Formulation • Define a “warped image” g • f(p,x) = x’ (warping function), p warp parameters • I(x,t) (image a location x at time t) • g(p,It) = (I(f(p,x1),t), I(f(p,x2),t), … I(f(p,xN),t))’ • Define the Jacobian of warping function • M(p,t) = • Consider “Incremental Least Squares” formulation • O(Dp, t+Dt) = || g(pt,It+Dt) – g(0,I0) ||2
Estimating motion parameters • Model • I0 = g(pt, It ) (image I, variation model g, parameters p) • DI = M(pt, It) Dp (local linearization M) • Define an error • et+1 = g(pt, It+1) - I0 • Close the loop • pt+1 = pt - (MT M)-1MT et+1 where M = M(pt,It) M is N x m and is time varying!
A Factoring Result Suppose I = g(It, p) at pixel location u is defined as I(u) = I(f(p,u),t) And= L(u)S(p) Then M(p,It) = M0 S(p) where M0 = M(0,I0)
O(mN) operations G is m x N, e is N x 1 S is m x m Numerical Solution • In general, solve • [STG S] Dp = M0T et+1 where G = M0TM0 constant! • pt+1 = pt +Dp • If S is invertible, then • pt+1 = pt - S-T G et+1where G = (M0TM0)-1M0T
G is constant! Local asymptotic stability! S is small and time varying Numerical Solution • In general, solve • [STG S] Dp = M0T et+1 where G = M0TM0 constant! • pt+1 = pt +Dp • If S is invertible, then • pt+1 = pt - S-T G et+1where G = (M0TM0)-1M0T
G is constant! Local asymptotic stability! S is small and time varying • In general, solve • [STG S] Dp = M0T et+1 where G = M0TM0 constant! • pt+1 = pt +Dp • If S is invertible, then • pt+1 = pt - S-T G et+1 where G = (M0TM0)-1M0T Stabilization Revisited
On The Structure of M u’i = A ui + d Planar Object -> Affine motion model: X Y Rotation Scale Aspect Shear
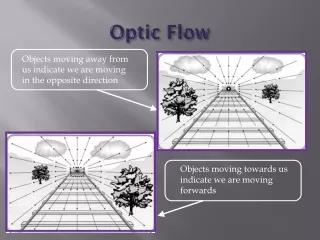
Organizing flowfields • Express flow field f in subspace basis m • Different “mixing” coefficients a correspond to different motions
Mathematical formulation Let: Mimimize objective function: = Where
ExperimentMoving camera • 4x4 pixel patches • Tree in foreground separates well
Experiment:Characterizing lip motion • Very non-rigid!