Download
1 / 10
100 likes | 363 Views
Update Presentation 2 Weeks 5-10. Optic Flow QuadCopter Control. Oscar Merry. Contents. Work Update Project Aims Optic Flow Magnitude Rotational Optic Flow Cancellation Obstacle Avoidance LabVIEW AR Drone Toolkit Demo Plan. Work Update. What have I been doing? Reading Literature

E N D
Update Presentation 2 Weeks5-10 Optic Flow QuadCopter Control Oscar Merry
Contents • Work Update • Project Aims • Optic Flow Magnitude • Rotational Optic Flow Cancellation • Obstacle Avoidance • LabVIEW • AR Drone Toolkit Demo • Plan
Work Update • What have I been doing? • Reading Literature • General Research • OpenCV • Optic Flow • Quadrotor Dynamics • AR Drone • LabVIEW
Project Aims • Specific objectives to address fundamentals of optic flow based control: • Rotational Optic Flow Cancellation • Velocity Estimation • Optic Flow Magnitude • Final objective: • Autonomous obstacle avoidance based on optic flow. • Note – No attitude control from optic flow.
Optic Flow Magnitude • 2 methods to be tested: • ‘Dense’ or global optic flow based on Horn-Schunck • ‘Sparse’ or local optic flow on pyramidal Lucas-Kanade • OpenCV implementations will be used as starting point for both methods
Rotational Optic Flow Cancellation • Problem: • Quadrotor’s attitude rotates when moving • This produces additional optic flow • Optic flow based on rotation is not wanted for obstacle avoidance • Solution: • Theoretical optic flow can be calculated: • Use IMU data to cancel rotational optic flow leaving translation and Yaw
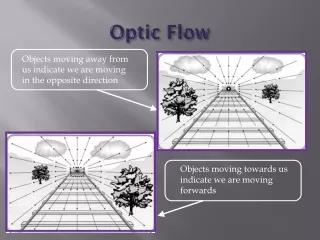
Obstacle Avoidance • Threshold set for optic flow magnitude • Evading action taken once threshold reached • Quadrotor to turn and continue forward in other direction • Altitude kept constant
LabVIEW • Graphical programming environment made up of virtual instruments (VIs) • Each VI made up of: • Front panel for UI • Block diagram of functional code • Benefit of LabVIEW: • Reuse of VIs (Existing and lower level • Can call functions written in text based languages (OpenCV library) using a Dynamic Link Library (DLL)
AR Drone Toolkit Demo • Overview of VIs • AR Drone VIs on lab PC are located at: • C:\Program Files (x86)\National Instruments\LabVIEW 2013\examples\LVH\AR Drone Toolkit • Shortcut created on desktop • Example – Simple Control VI • Example – Simple NavData VI
Plan • Next 2 weeks • Research and fully understand function of different AR Drone VIs • Research and experiment with linking OpenCV libraries into LabVIEW • Start work on first specific objective: • Optic flow magnitude