Download
1 / 20
200 likes | 225 Views
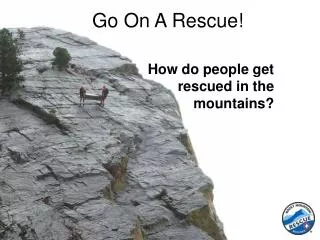
Rescue Robots A social relevant application. Arnoud Visser DOAS Kick-off 7 January 2008. Urban Search & Rescue (USAR). Research in USAR robotics is a vigorous research area Offers unique challenges that are difficult to create in a lab environment. Image from RoboCamp 2006 Tutorial.

E N D
Rescue RobotsA social relevant application Arnoud Visser DOAS Kick-off 7 January 2008
Urban Search & Rescue (USAR) • Research in USAR robotics is a vigorous research area • Offers unique challenges that are difficult to create in a lab environment Image from RoboCamp 2006 Tutorial
Applications of rescue robots • After the Oklahoma City bombing (1995), J. Blitch took notes as to how robots might have been applied. • The trigger for the RoboCup Rescue initiative was the Hanshi-Awaji earthquake which hit Kobe City on the same year. • Rescue robots were first used at the WTC 9/11 (2001). M. Micire analyzed the operations and identified seven research topics for the robotics community. • After 2001, rescue robots were applied in several occasions: • Aerial robots were used after hurricane Katrina and Rita • Boat robots after hurricane Wilma
Rescue Robots • Mini robots • Bomb-squad robots • Construction robots
Recommendations [1] • Research in image processing is needed for fast and accurate victim detection. • Automated tether management is needed for robot mobility assistance. • Methodologies to increase the quality of wireless communication is required for robots traveling deep into void structures. • Research must continue for small robots that can adaptively optimize their shape in difficult void structures. • Localization and mapping must be expanded to include highly unstructured domains. • Operator assistance through size and depth estimation techniques should be researched. • Assisted navigation techniques in highly irregular confined spaces must be explored to limit the number of pose and robot state errors. [1] M. Micire, "Analysis of the Robotic-Assisted Search and Rescue Response to the World Trade Center Disaster," Masters Thesis, University of South Florida, July 2002.
RoboCup Rescue Competitions • Infrastructure simulation • Distributed decision making • Cooperation • Simulations of: • Building collapses • Road Blockages • Spreading fire • Traffic • Real Robots • Single collapsed structure • Autonomous navigation • Victim location and assessment
Virtual Robot Competition • Autonomous multi-robot control • Human, multi-robot interfaces • 3D mapping and exploration of environments by multi-robot teams • Development of novel mobility modes and sensor processing skills • Lower entry barriers for developers • Competition based upon USARSim software
What is USARSim? • High-fidelity multi-robot simulator developed on top of an existing game engine • High performance physics and 3D rendering • Originally conceived as tool for Urban Search and Rescue (USAR), it has a much broader breadth
Basic Premise • Would like to be able to develop, debug, and evaluate cognitive systems • Repeatable trials • Known ground truth, noise, detections, false detections • Evaluation environment should provide realism • Realistic complexity • Tailored data output • Environmental interaction • Obey basic laws of physics in sensing and mobility Images from USARSim / MOAST Tutorial
Illustrative Example • What would an intelligent system need from this environment? • Extracted information? • Environmental interaction? • External knowledge?
One Possible Answer Geometric/Symbolic Ontology & Symbolic Data Server Information Wireframe Polygon Surface Models Symbolic: Chair, Properties: table, ?
World Interaction • Physics based interactions with world provide: • Realistic dangers to robot • Cues about object relationships • Mobility and manipulation challenges • …
World Interactions Ontology & Symbolic Data Server Symbolic Information Movement shows correct segmentation, which leads to… Symbolic: Properties: Chair
Previous Scenario Depicts an Embodied Intelligent Agent • Environment – provides some place to exist and objects to interact with • Embodiment – provides some way to move around in and effect change of the environment • Intelligence – provides some way to reason over percepts and to decide on appropriate actions Image from Russell, Norvig Artificial Intelligence
Conclusion Research in Rescue Robots is socially relevant. Currently working on two of Micire’s topics: • Localization in unstructured environments • Accurate Mapping with multiple robots • Information needed to optimize exploration