Download
1 / 42
420 likes | 615 Views
Quantitative Precipitation Estimation by WSR-88D Radar. Dan Berkowitz Applications Branch Radar Operations Center. WSR-88D Radar QPE. Where we were Where we are now Where we are going. Steps in Radar Rainfall Estimation.

E N D
Quantitative PrecipitationEstimation by WSR-88D Radar Dan Berkowitz Applications Branch Radar Operations Center
WSR-88D Radar QPE • Where we were • Where we are now • Where we are going
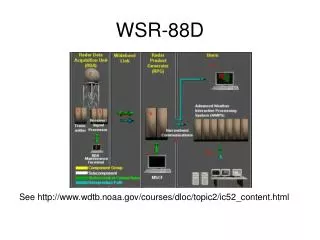
Steps in Radar Rainfall Estimation • Reflectivity is sampled for an unblocked volume in space by scanning at selected elevation angles. • Ground clutter contamination is reduced or eliminated. • An equation relating reflectivity to rainfall rate is applied. • Accumulations are made from each volume scan and added to the previous amounts. • Adjustments can be made to account for a bias – overestimate or underestimate compared with rain gauges. • Products are created and distributed to users.
History of Major Changes in PPS • 1991: First system deployment (using sectorized occultation data) • 1998: Terrain-based occultation data and additional rainfall rate relationships • 2004: Build 5 software with EnhancedPreprocessing (EPRE) and new (high vertical resolution) volume coverage pattern (VCP)
Objectives in Hybrid Scan Construction Original (Sectorized) Hybrid Scan -- The objective is to utilize reflectivity measurements from as close to 1-km altitude above radar level as possible while minimizing the likelihood of ground clutter and data loss due to terrain blockages (i.e., 1 km beam clearance). Terrain-based Hybrid Scan -- The objective is to use reflectivityfrom the lowest unblocked and “uncontaminated” elevation angle (i.e., 1 meter beam clearance).
Construction of Hybrid Scan Reflectivity • Generic hybrid scan construction from bottom four slices and USGS DEM terrain • Rings at 11, 19, and 27 nm • Terrain-based hybrid scan construction from bottom four slices and NIMA DTED terrain data • Elimination of most ring discontinuities • Beam blockage algorithm (BBA) starting in 2004 using NIMA and SRTM DTED data
Terrain and Blockage Map Quality • From 1991-1998USGS (NAD 27) “native DEM” data – Resolution was 3 arc-seconds, roughly 90 meters (1:250,000-scale), but with poor geolocation of some radar sites and with vertical accuracy inadequate for blockage determination (called “occultation data”). The algorithm for map generation was poor. • Starting 1998NIMA DTED-1 (NAD 83) – These were better and more complete data than USGS DEM data. An improved blockage map generation algorithm was used. • Starting 2005SRTM-1 DTED-2 (WGS 84 datum) – These data have a resolution of 1 arc-second, roughly 30 meters (1:24,000-scale) to be used within 50 km of each radar where it is available (i.e., not for sites above 60° N latitude)
Resolution of Digital Terrain Elevation Data(blue boxes = 3 arc-sec; red boxes = 1 arc-sec)
Clutter Mitigation • Clutter suppression of ground return in base data using near zero velocity (notch widths) • Ignoring AP-contaminated lowest elevation in PPS by use of the “tilt test” • Tilt test replaced in 2004 by Radar Echo Classifier AP Detection Algorithm (REC-APDA) on a bin-by-bin basis (Build 5 software) • Clutter suppression of ground return in base data using Gaussian Model Adaptive Processing (GMAP) with ORDA
Ground Returns (Ground Clutter) • NP = Normal Propagation ground returns (identified in a clutter bypass map) • AP = Anomalous Propagation ground returns (typically causing “contamination” of RPG products and often handled by operator-selected clutter suppression regions)(Note that atleastone volume scan will pass before an operator sees AP ground returns and “rectifies” them with clutter regions. A much greater period of time is likely to pass before an operator returns to bypass map only.)
Ground Clutter Mitigation – Legacy RDA ORPG RDA 1. Radar Echo Classifier (REC) APDetection Algorithm Clutter filtering:NP Clutter Bypass Map and/or clutter regions (low, medium, or high velocity notch width suppression) I & Q Zh, V, W Products 2. Enhanced Precip. Preprocessing (EPRE) (often with AP ground returns) 3. Hybrid Scan Refl. (HSR) used in PPS, SAA, & RCM
Ground Clutter Mitigation – Initial ORDA ORPG ORDA 1. Radar Echo Classifier (REC) APDetection Algorithm Clutter filtering (GMAP): NP Clutter Map and/or clutter regions I & Q Zh, V, W Products 2. Enhanced Precip. Preprocessing (EPRE) (often with AP ground returns) 3. Hybrid Scan Refl. (HSR) used in PPS, SAA, & RCM
Ground Clutter Mitigation – Proposed ORDA-based AP Detection ORPG ORDA 1. Radar Echo Classifier (REC) APDetection Algorithm 1. NP Clutter filtering (GMAP) I & Q Zh, V, W 2. RECPrecip. Detection Algorithm Products (Nearly all AP ground return is removed, as needed, in real time.) 2.Clutter Filter Decision Support (for AP) 3. Enhanced Precip. Preprocessing (EPRE) 3. AP Clutter filtering (GMAP) 4. Hybrid Scan Refl. (HSR) used in PPS, SAA, & RCM
Clutter Flag determined by CFDS Precipitation w/ velocities near 0 m/s NP Clutter CFDS Methodology and Example • CFDS will automate GMAP application in AP conditions • Fuzzy logic used to discriminate AP clutter from precipitation • GMAP applied only to gates with AP clutter • Precipitation is not filtered and, therefore, is not biased (unless weather spectrum is (narrow and centered at 0m/s velocity) • Clutter filtering is done in real time. • Example: KJIM squall line (assume NP clutter is AP clutter) Reflectivity – No GMAP Velocity – No GMAP
CFDS Specifies Where GMAP is Applied • Clutter flag specifies GMAP application • Near-zero precipitation return is not clutter filtered and no bias is introduced • NP clutter is removed and underlying signal recovered Reflectivity – CFDS turns GMAP on/off Velocity – CFDS turns GMAP on/off
What if GMAP is Applied Everywhere? • Example shown for comparison purposes only • Shows the bias that is introduced when precipitation is clutter filtered • CFDS will automate the clutter filter application decision and remove the human from this decision loop • Result: much improved moment estimates and data quality Reflectivity – GMAP applied at all gates Velocity – GMAP applied at all gates
Ground Clutter Mitigation – Dual Polarization (Proposed) ORDA ORPG 1. Hydrometeor Classification Algorithm (HCA) 1. NP Clutter filtering (GMAP) Zh, Zv, ZDR, V, W, ρhv, KDP, ΦDP I & Q Products 2. CFDS includes dual pol. variables (for AP) 2. Enhanced Precip. Preprocessing (EPRE v2) (AP ground return is removed in real time.) 3. Hybrid Scan DP moments used in Dual Pol. PPS, SAA, & RCM 3. AP Clutter filtering (GMAP)
Near or Deep Convection Volume Coverage Patterns VCP12 – starting 2004 VCP11
PPS Adaptable Parametersin Enhanced Preprocessing (EPRE) • CLUTTHRESH (refer to CLR product) • RAINZ (dBZ threshold) • RAINA (area threshold) • NEXZONE (number of exclusion zones) • Wind farms • Highways • Plumes
Supplementary Precipitation Data (SPD) VOLUME COVERAGE PATTERN = 21 MODE = A TIME CONT: PASSED GAGE BIAS APPLIED - NO BIAS ESTIMATE - 0.34 EFFECTIVE # G/R PAIRS - 11.38 MEMORY SPAN (HOURS) - 5.00 DATE/TIME LAST BIAS UPDATE - 06/24/05 20:26 TOTAL NO. OF BLOCKAGE BINS REJECTED - 0 CLUTTER BINS REJECTED - 41281 FINAL BINS SMOOTHED - 0 HYBRID SCAN PERCENT BINS FILLED - 99.86 HIGHEST ELEV. USED (DEG) - 9.90 TOTAL RAIN AREA (KM**2) - 15210.94 MISSING PERIOD: 06/24/05 16:06 06/24/05 17:27
Converting Reflectivity to Rainfall Rate • Default WSR-88D Convective Relationship (Z=300R1.4) • Additional Relationships (late 1990s) Optimized for Different Weather Situations • Tropical Convective (Rosenfeld) Z=250R1.2 • General Stratiform (Marshall-Palmer) Z=200R1.6 • Winter/Cool Stratiform & Orographic – East (Z=130R2.0) • Winter/Cool Stratiform & Orographic – West (Z=75R2.0)
G/R Mean Field Bias Table(in SPD product) LAST BIAS UPDATE TIME: 06/24/05 20:26 BIAS APPLIED ? NO
Horizontal Polarization: R(Zh) for all drop size distributions (with adaptable coefficient and exponent for specific weather regimes) Dual Polarization: R(Zh) okay for reference to past but underestimates in small droplet rain (low ZDR) and overestimates in large drop rainfall (high ZDR); highly vulnerable to hail contamination R(KDP) okay for cool season stratiform (esp. with bright band) but not good for long ranges or very light rain R(KDP,ZDR) okay for areal rainfall estimation and high rainfall rates R(Z,ZDR) okay for low rainfall rates R(Z,KDP,ZDR) “synthetic algorithm”good for warm season convection and best overall Evolution of Radar Rainfall Rate Calculation
Dual Polarization Weather Radar (by end of this decade) • Combined radar moments will lead to a Hydrometeor Classification Algorithm (HCA) to distinguish hail, heavy rain, snow, birds, insects, etc. • Rate relationship depends upon HCA.
fDP Z ZDR KDP Linear units Linear units R(KDP, ZDR) R(KDP) R(Z) 53 dBZ “cap” R(Z,ZDR) R(KDP-M) Smooth, filter R(Z) R(KDP-C) R(KDP-MS) Compare R(KDP) Threshold at 0.9 rhv Filter out AP, biological, unknown, and no echo from HCA R(Z) R(Z, ZDR) R(KDP, ZDR) R(KDP) R(Z, KDP, ZDR)
Uncertainties in Radar Precip. Estimation (abbreviated list) • Complete or partial beam blockage • Beam propagation path – height of sample • Mixed precipitation types (hail, rain, and/or snow) • Beam not filled with precipitation • Evaporation near the ground • Detection of non-meteorological targets(ground, birds, bugs, etc.) • Displacement of radar sample relative to a ground location (rain gauge) due to wind shear • Methods of integrating radar with rain gauge and satellite data
CNRFC 24-Hour Precipitation 17 Dec 2002 Radar Only Gauge Only
CNRFC 24-Hour Precipitation 17 Dec 2002 Radar Only Gauge Bias-Corrected Radar
CNRFC 24-Hour Precipitation 17 Dec 2002 Satellite Hydroestimator (mm) Gauge Bias-Corrected Hydroestimator
Summary • Blockages and ground clutter contamination are reduced. • EPRE provides flexibility to use new VCPs. • Multi-sensor mosaics enable River Forecast Centers and other radar data users to get better areal rainfall estimates. • Changes in the near future will reduce uncertainties and help discriminate meteorological from non-meteorological targets.
Dealing With Uncertainty “As we know, there are known knowns. There are things we know we know. We also know there are known unknowns. That is to say, we know there are some things we do not know. But there are also unknown unknowns, the ones we don’t know we don’t know.” -- Donald Rumsfeld (2004)
Snow Accumulation Algorithm Products • OSW, #144: One-Hour Snow Accumulation (Water Equiv.) • OSD, #145: One-Hour Snow Accumulation (Depth) • SSW, #146: Storm Total Snow Accumulation (Water Equiv.) • SSD, #147: Storm Total Snow Accumulation (Depth) • USW, #150: User Selectable Snow Accumulation (Water Equiv.) • USD, #151: User Selectable Snow Accumulation (Depth)