Download
1 / 19
220 likes | 482 Views
Navigation & Motion Planning. Cell Decomposition Skeletonization Bounded Error Planning (Fine-motion Planning) Landmark-based Planning Online Algorithms. Cell Decomposition. Break continuous space into finite number of cells, yielding a discrete search problem

E N D
Navigation & Motion Planning • Cell Decomposition • Skeletonization • Bounded Error Planning (Fine-motion Planning) • Landmark-based Planning • Online Algorithms
Cell Decomposition Break continuous space into finite number of cells, yielding a discrete search problem 1. Divide free space F into simple connected ‘cells’. 2. Determine which cells are adjacent to which others and create an ‘adjacency graph’. 3. Determine which cells the start and goal configurations lie in and search for a path in the adjacency graph between these cells. 4. Compute a path within each cell from the point of the boundary with previous cell to a boundary point meeting the next cell.
Cell Decomposition • Two Types • 1. Approximate Decomposition • sound but not complete • 2. Exact Decomposition • sound and complete
Skeletonization • Collapses the configuration space into a one-dimensional subset, or Skeleton. • Skeleton is a web with a finite number of vertices. • Path within a skeleton can be found by graph search methods. • Simpler than Cell-decomposition because it provides a ‘minimal’ description of free space.
Fine Motion Planning • Planning small, precise motions for assembly. • The environment is not precisely known. • Robot is unable to measure or control its position precisely. • Consists of a series of guarded motions • Each guarded motion consists of • 1. a motion command • 2. a termination condition
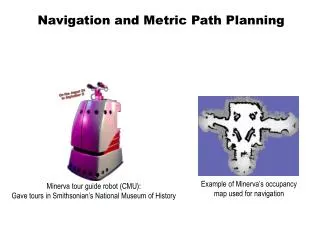
Landmark-based Navigation • Environment contains easily recognizable, unique landmarks. • A landmark is modeled as a point with a surrounding circular field of influence. • Within the field of influence, the robot is able to know its position exactly. • If the robot is outside of all fields of influence, it has no direct position information. • The robot’s control is assumed to be imperfect.
Online Algorithms • Can be used when nothing about the environment is known. • Decisions are made at run time. • Avoids the need for an offline planning stage. • Need to be simple because they must make choices at run time. • The robot cannot remember much about their environment.
Online Algorithms - Example Assumptions: 1. The environment is not known to the robot when it begins. 2. The robot cannot see anything. 3. It can only ‘see’ a boundary when it runs into it. Strategy: 1. Draw a line l , joining the initial position with the goal position. 2. If the robot encounters an obstacle, it stops and records its position Q. It then walks around the obstacle back to Q. During this walk, it records points where it crosses the line l, and how far it has reached to reach them. After the walk let P0 be the closest such point to goal. 3.The robot then walks around the obstacle from Q to P0.
Summary • Cell Decomposition and Skeletonization methods reduce a high dimensional, continuous space to a discrete graph-search problem. • Fine-motion Planning deals with uncertainty by creating a sensor-based plan that will work regardless of the exact conditions. • In the Landmark-based model, a robot uses certain well-known landmarks in the environment to determine where it is. • If nothing about the environment is known, then the robot will have to plan its navigation as it goes using Online Algorithms.