Download
1 / 26
260 likes | 479 Views
Aircraft Fault Detection and Classification Using Multi-Level Immune Learning Detection. Derek Wong* Scott Poll** Kalmanje KrishnaKumar** * University of Memphis ** NASA Ames Research Center. Presentation Outline. Problem Definition/Approach Prototype Domain Immune System

E N D
Aircraft Fault Detection and Classification Using Multi-Level Immune Learning Detection Derek Wong* Scott Poll** Kalmanje KrishnaKumar** *University of Memphis **NASA Ames Research Center
Presentation Outline • Problem Definition/Approach • Prototype Domain • Immune System • Negative Selection • Immunity-Based Fault Detection System • Neural Network Classifier • Results • Future Work
Problem Definition • Improve situational awareness of failures in the presence of an intelligent control system that is designed to compensate for those failures. • Awareness is required to inform the person of system degradation so that he does not perform an action that might lead to unexpected behavior. • Feed back failure information to controller to enable better handling qualities for degraded aircraft
Approach • Fault Detection • Inspired by the human immune system • Negative selection algorithm • Creates detectors in non-self space • Fault Isolation/Classification • Neural network classifiers • Identify pattern of activated detectors
Prototype Domain • Transport aircraft similar to Boeing 757 • 6 DOF, non-linear, high-fidelity simulator (FLTz) • Fault tolerant (w/o FDI) neural flight control system • Focus on flight control system failures • Ailerons, elevators, rudder, stabilizer • Hard-to-position (stuck), loss-of-effectiveness (degraded actuation) failures • Neural flight controller failures • Assume no control surface position sensors on aircraft
Prototype Domain (cont.) • Consider nominal cruise conditions • Mach: 0.78 – 0.84 • Altitude: 28,000 – 36,000 ft • Turbulence: none – moderate • Fly a sequence of roll and pitch maneuvers
Error Signals or Command Augmentation Signals Detector Generation using MILD Fault Classification using MILD Fault Detection and Classification Prototype Domain (cont.)
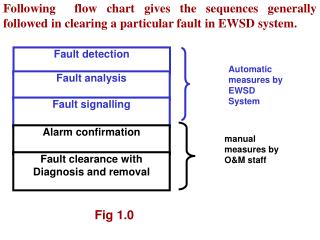
Biological Immune System • Protect living beings from external attacks (bacteria, virus, etc) • Primary response • Innate immune system • Adaptive Immune System • Secondary response • Remember past encounters • Faster response the second time around Infection ReInfection Innate Immunity Adaptive Immunity Specific Immune Memory Disease Recovery No Disease
Detector Set Protected Match No S Strings ( ) Yes Non-self Detected Use of Negative Selection 10010 10110 .. 11000 00101 Negative Selection 10110 ... 00101 Censoring Self -Protein 10010, 11000 Random T-cells Detector Set Monitoring
F1 Non_Self F4 Self F2 Self F3 Immunity Based Fault Detection Concept Illustration
Evolving Fault detectors • Goal: to evolve 'good' fault indicators (detectors) in the non-self (abnormal) space. • 'good' detector means: • It must not cover self. • It has to be as general as possible: the larger the volume, the better. • Collectively provide maximum coverage of the non-self space with minimum overlap • Some detectors serve as specialized (signature for known fault conditions) and others are for probable (or possible) faulty conditions.
Different Computational Steps (a) Calculate detector radius (b) Moving a detector (c) Cloning a detector
Self Matured detectors from current iteration Matured detectors from all previous iterations *Candidate detectors from random generation xCandidate detectors from move operation +Candidate detectors from clone operation 2-D Detector Generation Example
Self Matured detectors from current iteration Matured detectors from all previous iterations *Candidate detectors from random generation xCandidate detectors from move operation +Candidate detectors from clone operation 2-D Detector Generation Example (cont.)
Self Matured detectors from current iteration Matured detectors from all previous iterations *Candidate detectors from random generation xCandidate detectors from move operation +Candidate detectors from clone operation 2-D Detector Generation Example (cont.)
Self Matured detectors from current iteration Matured detectors from all previous iterations *Candidate detectors from random generation xCandidate detectors from move operation +Candidate detectors from clone operation 2-D Detector Generation Example (cont.)
Self Matured detectors from current iteration Matured detectors from all previous iterations *Candidate detectors from random generation xCandidate detectors from move operation +Candidate detectors from clone operation 2-D Detector Generation Example (cont.)
Self Matured detectors from current iteration Matured detectors from all previous iterations *Candidate detectors from random generation xCandidate detectors from move operation +Candidate detectors from clone operation 2-D Detector Generation Example (cont.)
Self Matured detectors from current iteration Matured detectors from all previous iterations *Candidate detectors from random generation xCandidate detectors from move operation +Candidate detectors from clone operation 2-D Detector Generation Example (cont.) …after 20 iterations: 188 matured detectors
Neural Network Classifier • Multi-layer perceptron with back-propagation algorithm • One network for each fault type • Detectors activated for fault fed to input layer nodes • Hidden layer • Output layer is single node with value [0 1] • Data input to each network, assign class to network with highest output value
Associating Detectors with Failures Fault type #1 Fault type #2 Etc…
Fault Type Fault Type Activated Detectors Activated Detectors Detection Rate (%) Detection Rate (%) False Alarm Rate (%) False Alarm Rate (%) Mean Mean Std Deviation Std Deviation Mean Mean Std Deviation Std Deviation +L elevator +L elevator 6 6 92.3 94.7 0.88 0.84 1.19 0.49 0.53 0.07 -L elevator -L elevator 7 7 83.2 81.6 0.92 0.94 0.53 1.21 0.08 0.23 +R elevator +R elevator 8 8 92.9 89.9 0.86 0.92 0.38 1.08 0.09 0.36 -R elevator -R elevator 9 9 88.6 85.3 0.89 0.83 1.14 0.37 0.05 0.29 +L aileron +L aileron 4 4 99.5 94.6 0.89 1.06 0 0.26 0.17 0 -L aileron -L aileron 9 9 93.4 97.8 0.98 1.22 0.35 0 0.12 0 +R aileron +R aileron 8 8 96.8 98.7 1.03 1.09 0 0.72 0.11 0 -R aileron -R aileron 11 11 92.1 96.2 0.98 1.11 0.28 0 0.24 0 Detection Results No activation threshold With activation threshold
NONE +L elevator -L elevator +R elevator -R elevator +L aileron -L aileron +R aileron -R aileron NONE 1 0 0 0 0 0 0 0 0 +L elevator 0.08 0.82 0.02 0 0.08 0 0 0 0 -L elevator 0.11 0.04 0.79 0.06 0 0 0 0 0 +R elevator 0.06 0 0.07 0.84 0.03 0 0 0 0 -R elevator 0.02 0.07 0.03 0 0.88 0 0 0 0 +L aileron 0.02 0 0 0 0 0.92 0 0.06 0 -L aileron 0.04 0 0 0 0 0 0.89 0 0.07 +R aileron 0.07 0 0 0 0 0.11 0 0.82 0 -R aileron 0.02 0 0 0 0 0 0.04 0 0.92 Classification Results
Future Work • Detection/classification results for more fault types • Acquire and analyze data for other flight regimes • Examine sensitivity to different pilots and flight regimes • Examine higher order detector shapes • Explore concept of gene library for detection process