Download
1 / 1
20 likes | 150 Views
Development of the MACARM - a Novel Cable Robot for Upper Limb Neurorehabilitation.

E N D
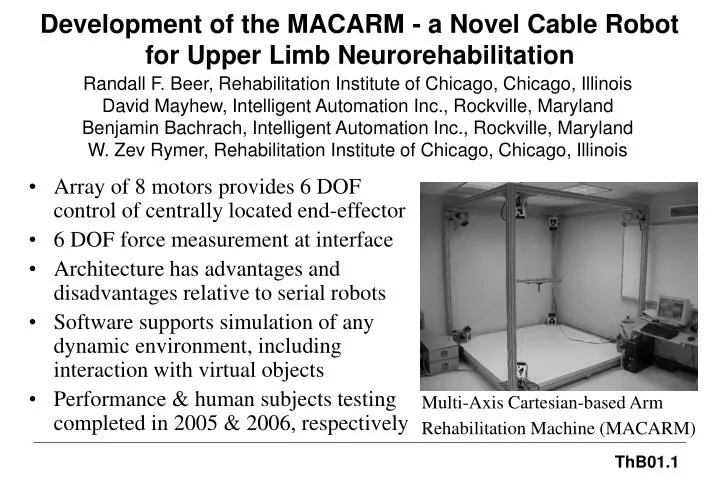
Development of the MACARM - a Novel Cable Robot for Upper Limb Neurorehabilitation Randall F. Beer, Rehabilitation Institute of Chicago, Chicago, IllinoisDavid Mayhew, Intelligent Automation Inc., Rockville, Maryland Benjamin Bachrach, Intelligent Automation Inc., Rockville, Maryland W. Zev Rymer, Rehabilitation Institute of Chicago, Chicago, Illinois • Array of 8 motors provides 6 DOF control of centrally located end-effector • 6 DOF force measurement at interface • Architecture has advantages and disadvantages relative to serial robots • Software supports simulation of any dynamic environment, including interaction with virtual objects • Performance & human subjects testing completed in 2005 & 2006, respectively Multi-Axis Cartesian-based Arm Rehabilitation Machine (MACARM) ThB01.1