Download
1 / 33

E N D
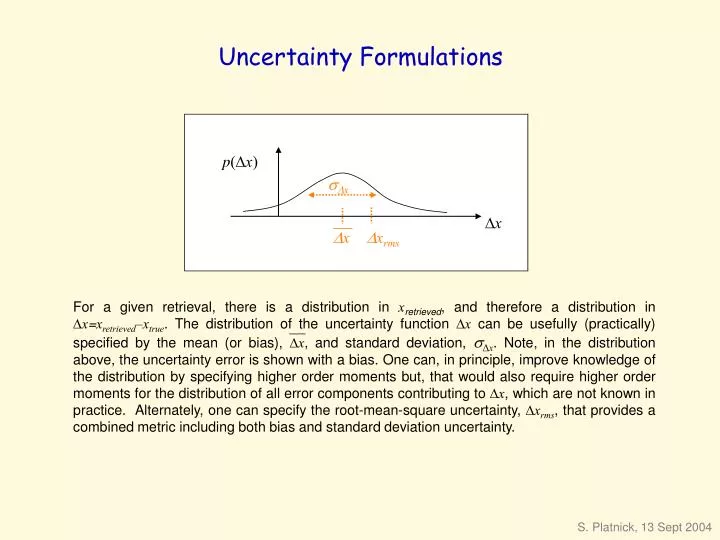
p(Dx) sDx Dx Dx Dxrms For a given retrieval, there is a distribution in xretrieved, and therefore a distribution in Dx=xretrieved–xtrue. The distribution of the uncertainty function Dx can be usefully (practically) specified by the mean (or bias), Dx, and standard deviation, sDx. Note, in the distribution above, the uncertainty error is shown with a bias. One can, in principle, improve knowledge of the distribution by specifying higher order moments but, that would also require higher order moments for the distribution of all error components contributing to Dx, which are not known in practice. Alternately, one can specify the root-mean-square uncertainty, Dxrms, that provides a combined metric including both bias and standard deviation uncertainty. Uncertainty Formulations S. Platnick, 13 Sept 2004
Uncertainty Formulations (2) Dx a scalar-valued random variable With the simpler notation, x= xretrieved: S. Platnick, 13 Sept 2004
Uncertainty Formulations (3) - multiple error components If Dx consists of N separate uncertainty (error) components, Dxk, can write: S. Platnick, 13 Sept 2004
IF cor = 0 for all Dxk, Dxl, THEN variance reduces to the root-sum-square value: IF Dx =0 (regardless of cor): IF cor = 0 for all Dxk, Dxl AND Dx =0: Uncertainty Formulations (4) - correlation Note: -1≤ cor(Dxk,Dxl) ≤ 1 cor(Dxk,Dxl)> 0 => positive correlation; <0 => negative correlation; =0 => uncorrelated Dxk and Dxl are independent => cor =0; converse IS NOT true Note: DxkDxl =0if uncorrelated ANDDxk =0 or Dxl =0 (zero bias) Example: If Dxl= a Dxk + b thencor= ±1.0 (a > 0=> cor = +1.0, a < 0 => cor = -1.0) S. Platnick, 13 Sept 2004
from forward libraries Pixel-level Uncertainty Analysis Derivation Utilizes retrieval sensitivity partial derivatives of the form: Coupled with estimates for the contribution of various error sources to the uncertainty in cloud-top reflectance R1 and R2, we can infer the uncertainty in t and re (random error and/or biases). In following, use the simpler notation: S. Platnick, 13 Sept 2004
For the distribution resulting from a set of m realizations (note: we allow the reflectance components to be correlated, i.e., ), we have from linear combination rules for random variables (p. 2): Pixel-level Uncertainty Analysis Derivation (2) As an example, the t retrieval uncertainty due to N independent (uncorrelated) error sourcesk can be written as: For a given pixel, any particular realization, m, of the kth uncertainty component contributes to retrieval uncertainty through the the sensitivity derivatives: S. Platnick, 13 Sept 2004
Pixel-level Uncertainty Analysis Derivation (3) vector-valued random variable Representing the retrieval as a vector dependent on the same reflectance uncertainties allows for correlations (covariances) between Dt and Dre. These covariances were ignored on the previous page. A complete description for the variance of a 2-element vector is given by the covariance matrix, which includes non-diagonal correlation terms: If another vector Dy can be written in terms a matrix operation on the Dx vector, then: S. Platnick, 3 Oct 2004
Pixel-level Uncertainty Analysis Derivation (4)Dx a vector-valued random variable Vector example. For the application at hand, the matrix form for the error component k: The diagonal elements are same as at bottom of “Pixel-level Uncertainty Analysis Derivation (2)”, e.g., The off-diagonal term (symmetric) is: S. Platnick, 3 Oct 2004
Pixel-level Uncertainty Analysis Derivation (5)Dx a vector-valued random variable Vector ex., continued. If the reflectance uncertainties are given in relative terms (dispersion): S. Platnick, 3 Oct 2004
Pixel-level Uncertainty Analysis Derivation (6)Dx a vector-valued random variable Vector ex., continued. If the reflectance uncertainties are given in relative terms (dispersion): The diagonal elements are now: The off-diagonal term (symmetric) becomes: S. Platnick, 3 Oct 2004
Pixel-level Uncertainty Analysis Derivation (7)Dx a vector-valued random variable Vector ex., continued. If the reflectance uncertainties are given in relative terms (dispersion): The diagonal elements: The off-diagonal term (symmetric): S. Platnick, 3 Oct 2004
Pixel-level Uncertainty Analysis Derivation (8) vector-value, multiple error components If the Dy vector consists of N separate uncertainty (error) components, we can write: Note that the diagonal elements are same as at bottom of “Uncertainty Formulations (3) - multiple error components”. I do not have a general form for retrieval covariance matrix for N>2. However, if the error sources are independent, then: S. Platnick, 3 Oct 2004
Pixel-level Uncertainty Analysis Derivation (9) vector-value, multiple error components For example, if we have the following 3 error components: isntrument calibration, atmospheric transmittance (used for atmospheric corrections), and surface albedo: S. Platnick, 3 Oct 2004
If spectral calibration uncertainty is uncorrelated, noting , and that uncertainty is typically given in terms of the dispersion, we obtain: Pixel-level Uncertainty Analysis - Calibration Instrument calibration uncertainty: scalar form The distribution for this component is typically specified by standard deviation error alone. It is assumed that calibration bias is zero (if known/understood, it could be taken out). Then if the standard deviation, or equivalently rms uncertainty with the above assumption, is assumed to be constant (independent of scene radiance, not necessarily true) we obtain: S. Platnick, 13 Sept 2004
Pixel-level Uncertainty Analysis - Calibration (2) Instrument calibration uncertainty: vector form S. Platnick, 5 Oct 2004
Pixel-level Uncertainty Analysis - Atmosphere Atmospheric correction (above-cloud transmittance uncertainty): scalar form The distribution for this component is determined by (1) transmittance table uncertainty (due to MODTRAN and O3 Chappius band model error) and error due to parameterization of above-cloud transmittance by column PWc), and (2) NCEP/CTP PWc and TOVS column O3 errors; note, the latter dominates the former. S. Platnick, 13 Sept 2004
Atmospheric correction (above-cloud transmittance uncertainty): scalar form Same as before but uncertainties given in relative units (DR/R , sDR/R = sR/R): Pixel-level Uncertainty Analysis - Atmosphere (2)
Pixel-level Uncertainty Analysis - Atmosphere (3) For a particular band, Rc = reflectance at cloud-top, Rm = TOA measured reflectance, t0 = nominal 2-way transmittance for solar reflectance correction (i.e., value used in the retrieval): With respect to uncertainty formula on previous page, dropping c subscript, and using notation R0 = R(t0): S. Platnick, 13 Sept 2004
Pixel-level Uncertainty Analysis - Atmosphere (4) There are two independent sources of above-cloud transmittance uncertainty. 1. Transmittance table uncertainty: S. Platnick, 29 Sept 2004
Pixel-level Uncertainty Analysis - Atmosphere (5) 2a. Above-cloud precipitable water (PWc) uncertainty: t ≈ linear in PWc S. Platnick, 29 Sept 2004
Pixel-level Uncertainty Analysis - Atmosphere (6) 2b. Above-cloud precipitable water (PWc) uncertainty: t ≈ quadratic in PWc S. Platnick, 29 Sept 2004
Pixel-level Uncertainty Analysis - Atmosphere (7) 2c. Above-cloud precipitable water (PWc) uncertainty: t numerical S. Platnick, 29 Sept 2004
Pixel-level Uncertainty Analysis - Atmosphere (8) 2c. Above-cloud precipitable water (PWc) uncertainty: t numerical, cont. S. Platnick, 29 Sept 2004
Pixel-level Uncertainty Analysis - Atmosphere (9) The correlation between bands 1 and 2 is required for estimating the impact of the PWc uncertainty. Since cov(axi,bxj)= ab cov(xi,xj) and var(axi) = a2 var(xi), it can be shown that cor(axi,bxj) = cor(xi,xj). Therefore: Recall that if Dt2= a Dt1 + b thencor= +1.0 if a > 0. For small DPW=dPW, both functions are linearizedabout PW0 and dt1= a1PW, dt2= a2PW, or dt2= a2/a1dt1. Therefore,cor= +1.0. Note that this so-called Pearson’s correlation gives ±1 only for linear relationships. So as DPW becomes finite, the non-linearity in the two functions reduces the correlation. However, calculations of cor(t1,t2) for exponential-like transmittance functions with rather extreme differences (e.g., t’s with curves lying between vis and 3.7 µm) and over an extended range (PW ranging from 0-5 cm) still show very high correlations (~0.95 and greater). Therefore, it seems safe to assume: S. Platnick, 29 Sept 2004
Pixel-level Uncertainty Analysis - Atmosphere (10) Atmospheric correction sources 1. & 2. : For combining transmittance table and PWc uncertainties, note that the two components are independent (one based on atmospheric transmittance band model and assumption regarding dependency only on PWc and not profile details, the other on model analysis and cloud-top pressure estimate). Therefore: S. Platnick, 29 Sept 2004
With Table and PW components independent, and Pixel-level Uncertainty Analysis - Atmosphere (11) Atmospheric correction (above-cloud transmittance uncertainty): vector form S. Platnick, 5 Oct 2004
Surface albedo uncertainty: scalar form Same as for atmospheric correction derivation with relative uncertainties given (DR/R , sDR/R = sR/R). Pixel-level Uncertainty Analysis - Surface S. Platnick, 30 Sept 2004
Pixel-level Uncertainty Analysis - Surface (2) For a particular band, Rc = reflectance at cloud-top: Variance: as before, dropping c subscript and using notation R0 = Rc(A0): S. Platnick, 30 Sept 2004
Co-variance: What is the correlation Pixel-level Uncertainty Analysis - Surface (3) Uncertainties in spectral surface albedo maps involve: clear sky determination (cloud masking), snow masking, BRDF model, temporal interpolation for cloudy 16-day time periods, etc. We wouldn’t expect the correlation to be exactly zero to the extent that these error sources are likely coupled to some extent across bands (certainly masking errors). So what to use? Bias: S. Platnick, 30 Sept 2004
Pixel-level Uncertainty Analysis - Surface (4) Surface albedo uncertainty: vector form S. Platnick, 5 Oct 2004
Pixel-level Water Path Uncertainty Water path uncertainty: scalar form S. Platnick, 6 Oct 2004
Pixel-level Water Path Uncertainty (2) Water path uncertainty: scalar form S. Platnick, 6 Oct 2004
Pixel-level Water Path Uncertainty (3) Water path uncertainty: scalar form S. Platnick, 6 Oct 2004