Download
1 / 40
430 likes | 686 Views
Introduction to x86. Computer Architecture. What is an x86 Processor. An x86 Processor is now a general term used to refer to a class of processors that share a common subset of instructions

E N D
Introduction to x86 Computer Architecture
What is an x86 Processor • An x86 Processor is now a general term used to refer to a class of processors that share a common subset of instructions • Some x86 microprocessors are: Athlon (AMD), Opteron (AMD), Pentium IV (Intel), Xeon (Intel), Pentium Core Duo (Intel), Athlon X2 (AMD) • Most popular desktop and sever processors • Knowing instructions for one, you can program for any other processor • Some processors have additional instructions that cannot be used on others!
x86 Philosophy on Instructions • x86 Processors follow the Complex Instruction Set Computer (CISC) Philosophy • It is converse to the Reduced Instruction Set Computer (RISC) Philosophy • The data path we discussed in class falls under the category of RISC • x86 processors provide a lot of (relatively) complex instructions • When you look at the manuals the number of instructions will strike you. • Each instruction has its own peculiarity to watch out for.
Microprogramming • Microprogramming is a computer architecture design strategy in which complex instructions are actually implemented as a sequence of micro (or smaller) instructions. • Sequence of microinstructions is called a micro program. • The are carefully designed and optimized for fastest execution. • CPU is actually executing micro programs rather than the main code and consequently has a RISC type computing core! • CISC architectures often use microprogramming.
Micro program Example • Example of a micro program to perform operation Add R1, R2 (R2 = R2 + R1) • Select register R1 as 1st Input to ALU • Select register R2 as 2nd Input to ALU • Set carry input of ALU to zero • Select ALU to perform 2’s complement addition • Direct result from ALU to register R2 • Update flags as necessary
Micro program storage • Micro programs need to be retrieved and processed at high speed! • They are stored directly on the CPU and are hardwired to the data path. • The storage location is called a control store. • Micro programs are typically just bits that are applied to inputs of various devices in the data path. • Like selection bits for multiplexers and de-multiplexers
Micro instruction implementations • Microprogramming maybe implemented using two different strategies • Vertical micro codes • One micro instruction at a time just like a conventional program. • Horizontal micro codes • Several or all micro instructions are processed simultaneously.
Vertical Micro Codes • This is older/simple approach. • In this strategy micro codes are executed one after another in a serial fashion. This is type is similar to conventional program execution (one instruction at a time) 00110001 Sequence of short micro codes to implement a macro instruction (vertical organization) 00000001 00001111 11110000
Horizontal Micro Codes • This is a newer and faster approach • Adopted as transistors started becoming cheaper • Micro codes are typically executed in parallel making micro instructions much faster! • The drawback is that microinstructions become much wider as they have to accommodate all bits (even if they are not used) in each instructions. • All instructions have microinstructions of the same size 00110001 00000001 00001111 11110000 Horizontal organization of micro codes to make a single microinstruction!
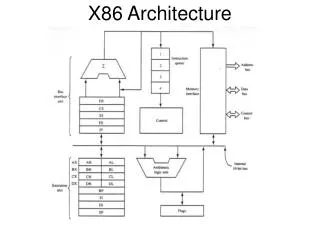
x86 Architecture • Most x86 processors use little microprogramming. • Most instructions are directly executed by a complex data path • Some advanced instructions and looping instructions use microprogramming • The x86 manual typically provides the microinstructions to explain the working of each instruction • You really don’t have to worry about all the details when writing assembly language code for a given processor.
Assembly programming with x86 • In order to do assembly programming with x86 you need to know the following: • Registers provided by x86 processors • Instruction set • Refer to x86 instruction set manuals available from Intel. • http://www.intel.com/design/pentium4/manuals/253666.htm • http://www.intel.com/design/pentium4/manuals/253667.htm • A text editor to type out your assembly program • An assembler & linker to convert assembly to binary
x86 Registers • x86 registers are grouped into two categories • General purpose registers • Used for doing arithmetic and logic operations • Used like temporary variables in programs • Reserved (or specialized) registers • These are used by the microprocessor internally for performing certain operations • The values in these registers are typically not modified by programs • They are set and handled by the operating system that loads and runs your programs.
General purpose x86 Registers • 4-basic 32-bit registers that can be reused as 16-bit or 8-bit registers • 32-bit registers are called: eax, ebx, ecx, and edx • Low 16-bit parts of 32-bit registers are correspondingly called: ax, bx, cx, and dx • 8-bits parts are called: ah, al, bh, bl, ch, cl, dh, & dl Bit positions 32 16 15 8 7 0 AH AL AX EAX BH BL BX EBX Names for low 16-bits CH CL ECX CX DH DL EDX DX Cannot use high 16-bits independently!
Using parts of registers 00 00 00 00 00 01 01 01 • Note that registers eax, ax, ah, and al all share the same register space! • They are names for parts of the same register! • Altering any one correspondingly alters other registers as well! • Example Now AH = 1, AL = 1 but EAX and AX = 257! Set EAX to 1 Change AH to 1 EAX
Other general purpose registers • The x86 processor also provides other general purpose registers. • They cannot be accessed as bytes! • Smallest unit is lower 16-bits Register Names for low 16-bits Bit positions 32 16 15 8 7 0 BP EBP (Base Pointer) SI ESI (Source Index) DI EDI (Destination Index) SP ESP (Stack Pointer) Cannot use high 16-bits independently!
Segment Registers • Segment registers (16-bits) are special registers • 4 Special segment registers • CS – Code Segment register • Indicates an area of memory in which instructions are stored. • DS – Data Segment register • Indicates an area of memory in which R/W data is stored. • SS – Stack Segment register • Area of memory in which stack for a program is stored. • Stack is used for calling methods/functions/subprograms • ES – Extra Segment register • Used for copying data from one segment to another. • They are typically set by the operating system • You will never change them (in this course) • We will discuss segment registers further in the course
EFLAGS Register • EFLAGS register is a special (32-bit) register that contains flags (bits) generated from results of ALU operations. • Typically, the only way to change the values is to perform an ALU operation. • Usually a set of individual flags (or bits) are selectively changed by each instruction. • You have to know which instruction changes which bit! • Initially it is hard but with some practice you will get the hang of it. • Each bit can be indirectly inspected using suitable instruction • Typically a conditional jump instruction!
Flags in EFLAGS • Certain flags in EFLAGS are frequently used • ZF: Zero Flag • Set if output from ALU is zero. Cleared otherwise. • CF: Carry Flag • Set if arithmetic operation generates a carry or borrow. • This flag indicates overflow for unsigned arithmetic. • PF: Parity Flag • Set if least significant byte (8-bits) of result from ALU has an even number of 1s. • SF: Sign Flag • Set to most significant bit of the result (1 indicates negative result while 0 indicates positive result)
Instruction Pointer (IP) • It is a special 32-bit register that indicates the address of the next instruction to be executed by the microprocessor. • The register is called EIP in x86 processors • Value is typically initialized by the OS when programs are loaded into memory. • Changed by conditional or unconditional jumps • By function/method calls
Reading the Manual • Now that you know about registers, it is now time to start exploring instructions supported by x86 processors. • For this task you have to refer to the Intel manuals for details of instructions. • First you need to understand the notations used • I will explain some of the notation using an example. • You have to learn other notations by reading the manual.
The MOV instruction • One of the most overloaded instruction in the x86 manual for assignment operation • Copy value from one location to another • Location can be memory, register, or constant! • Handles all possible combinations using different op-codes • Mnemonic is the same but op-codes are different! • Refer to page 635 of Instruction Set reference • http://download.intel.com/design/Pentium4/manuals/25366620.pdf
Snippet from Manual All you need to know is what do the notations (r/m32 or imm8) actually imply.
Understanding notation • Review section 3.1.1.2 (Page 51) of the instruction manual • http://download.intel.com/design/Pentium4/manuals/25366620.pdf • rN:A N-bit register (EAX etc. for 32-bit, AX etc. for 16-bit, AL/AH etc. for 8-bit) • immN: An N-bit immediate or constant value (represented as unsigned or 2’s complement) • mN: A N-bit memory address from where K-bytes are to be stored. Value of K depends on size of value being R/W • r/mN (r/m8, r/m16, r/m32) : A N-bit register or N-bit memory address to read/write data to.
Manual to Assembly Conversion • The assembler we are going to use uses a different notation • Instructions are written with destination registers last • Register names are prefixed in % sign • Constant values are prefixed with $ sign • Example: $31, $3.142 • Hexadecimal constants are written as $0x7F • Hexadecimal constants cannot use fractions like $0x7F.A • Octal constants have leading 0 as $071 • Binary constants have a ‘b’ at the end like $01110b
Example Translation • Examples of various MOV instructions: Suffix Interpretation b – byte w – word (2-bytes) l – int/long (4-bytes)
Variables • In assembly symbols (or variables) are typically used to refer to addresses • Variables have a type associated with them which defines the following attributes: • Size (in bytes): Most important in assembly • Once defined you cannot change the size! • Data type: Weak concept in assembly • You can always reinterpret values in different ways • Valid types are: • byte (1-byte) • word (2-bytes) • int or long (4-bytes) • float (4-bytes) • string (array of bytes)
Defining Variables • Variables are defined by defining a symbol • With a given type • And a default initial value. var1: .int -32/* Java: int var1 = -32; */ var2: .byte 0/* Java: byte var2 = 0; */ var3: .float -3.142 /* Java: float var3 = -3.142; */ Comments are delimited by /* and */ character sequences!
Putting it all together! • The first almost complete assembly: /* Program to swap values of variables var1 & var2 */ .text/* Every thing below goes in Code Segment */ .global _start/* Global entry point into program */ _start:/* Indicate where program starts */ movl val1, %eax /* eax = val1 */ movl val2, %ebx /* ebx = val2 */ movl %eax, val2 /* val2 = eax */ movl %ebx, val1 /* val1 = ebx */ .data /* Everything below goes in data segment */ val1: .int 10 val2: .int 20
Problem with earlier code • The previous assembly is actually valid • It will compile, link, run do swapping of integers • However, it does not terminate! • How to make the program terminate? • One way is to stop the microprocessor from processing further instructions. • Have to tell the OS to stop the program (or process) from running further • Need to interact with OS for this task.
OS Interactions • Example code to stop a process (or program) from running • Invoke an OS routine or “system call” .text/* Every thing below goes in Code Segment */ .global _start/* Global entry point into program */ _start:/* Indicate where program starts */ /* Rest of the program actually goes here */ movl $1, %eax /* Set eax=1, SysCall Code for exit */ movl $0, %ebx /* Exit code value set to zero */ int $0x80 /* Transfer control to OS */ .data Read as call Interrupt 80 hex! (Transfer control to OS). This is OS specific! Will Not work on Windows!
The Final Assembly /* Program to swap values of variables var1 & var2 */ .text/* Every thing below goes in Code Segment */ .global _start/* Global entry point into program */ _start:/* Indicate where program starts */ movl val1, %eax /* eax = val1 */ movl val2, %ebx /* ebx = val2 */ movl %eax, val2 /* val2 = eax */ movl %ebx, val1 /* val1 = ebx */ movl $1, %eax /* Set eax=1, SysCall Code for exit */ movl $0, %ebx /* Exit code value set to zero */ int $0x80 /* Transfer control to OS */ .data /* Everything below goes in data segment */ val1: .int 10 val2: .int 20
More Instructions • I will cover some basic, core instructions in class. • You are expected to review the instruction manuals to obtain a comprehensive list of instructions!
Add Instruction • Add instruction performs integer addition • It is applicable for both signed & unsigned numbers • Sets OF, CF, and SF based on result of addition
Sub Instruction • Sub instruction performs integer subtraction • It is applicable for both signed & unsigned numbers • Sets OF, CF, and SF based on result of addition
MUL Instruction • MUL Instruction comes in 2 flavors • Note: Multiplying 2 n-bit numbers generates a 2n-bit result • Example: Multiplying 2 32-bit numbers generates a 64-bit result. • MUL: Performs unsigned multiplication • IMUL: Performs signed integer multiplication • Source and destination registers are implied! • Source: Uses AL, AX, or EAX depending on size of operand • Destination: Uses DX:AX or EDX:EAX to store 32-bit or 64-bit result!
MUL (Continued) • OF and CF are set to 0 if upper half of the result is 0 • Values in SF, ZF, PF are undefined at the end of the instruction!
DIV Instruction • DIV Instruction comes in 2 flavors • DIV: Performs unsigned division • IDIV: Performs signed integer division • Source and destination registers are implied! • Source: Uses AL, AX, or DX:AX or EDX:EAX depending on size of divisor • Destination: Uses AX or DX:AX or EDX:EAX to store remainder and quotient respectively
DIV (Continued) • Values of CF, OF, SF, ZF, and PF are undefined! • Before performing idiv use cdq instruction to sign extend eax value to edx. Otherwise your division will give incorrect results for negative numbers!