Download

1 / 8
90 likes | 257 Views
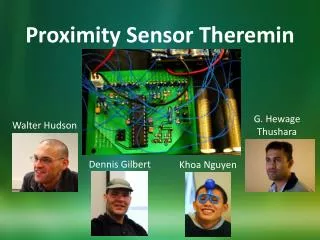
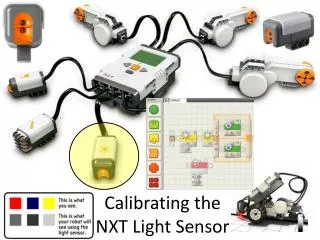
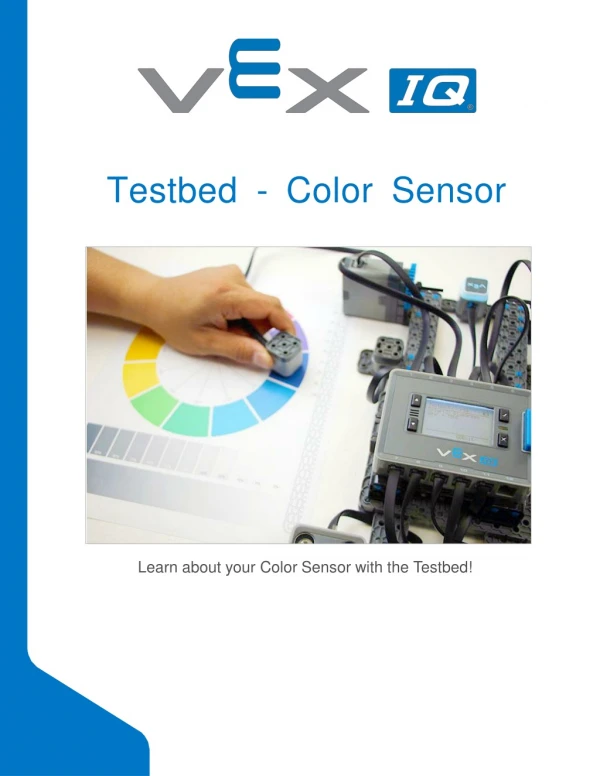
Simulation of a Segway PT NXT Color Sensor as a proximity sensor Robot balances itself Required skill level Building: 3 out of 4 Programming: 4 out of 4. Robot does not have any special sensors aside from the color sensor Relative tilt based on the reflected light.

E N D
Simulation of a Segway PT • NXT Color Sensor as a proximity sensor • Robot balances itself • Required skill level • Building: 3 out of 4 • Programming: 4 out of 4 LEGO SEGWAY PRESENTATION
Robot does not have any special sensors aside from the color sensor • Relative tilt based on the reflected light LEGO SEGWAY PRESENTATION
Locate the color sensor in the shadows • Florescent lights will cause less interference than incandescent lights • When releasing the robot make sure the shadows and lighting do not change LEGO SEGWAY PRESENTATION
Create a surface with uniform brightness • Blank white paper • Uniform solid color with no pattern • Textured patterns will cause variances in light reflection LEGO SEGWAY PRESENTATION
Robot must start perfectly balanced to begin with • Robot works by trying to seek the same reflected light as the start LEGO SEGWAY PRESENTATION
Building Instructions • http://www.nxtprograms.com/NXT2/segway/steps.html • Programming Instructions • http://www.nxtprograms.com/NXT2/segway/steps.html#Program LEGO SEGWAY PRESENTATION