Download
1 / 1
10 likes | 82 Views
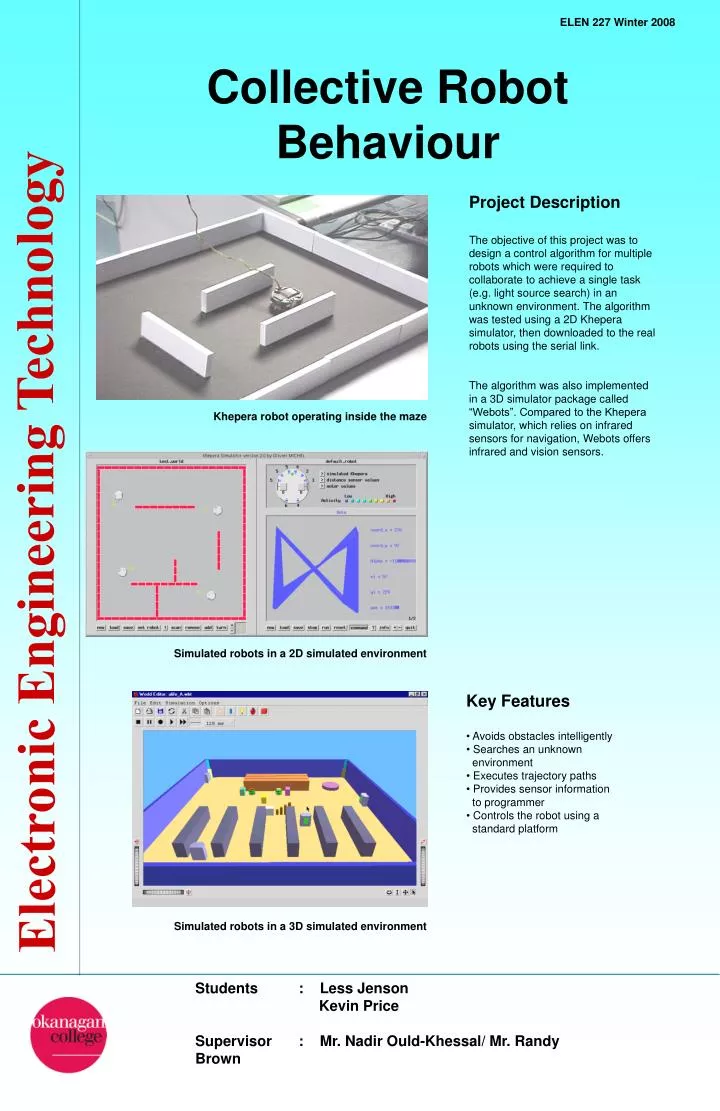
ELEN 227 Winter 2008. Collective Robot Behaviour. Project Description.

E N D
ELEN 227 Winter 2008 Collective Robot Behaviour Project Description The objective of this project was to design a control algorithm for multiple robots which were required to collaborate to achieve a single task (e.g. light source search) in an unknown environment. The algorithm was tested using a 2D Khepera simulator, then downloaded to the real robots using the serial link. The algorithm was also implemented in a 3D simulator package called “Webots”. Compared to the Khepera simulator, which relies on infrared sensors for navigation, Webots offers infrared and vision sensors. Photograph Khepera robot operating inside the maze Electronic Engineering Technology Simulated robots in a 2D simulated environment Key Features Photograph • Avoids obstacles intelligently • Searches an unknown • environment • Executes trajectory paths • Provides sensor information • to programmer • Controls the robot using a • standard platform Simulated robots in a 3D simulated environment Students : Less Jenson Kevin Price Supervisor: Mr. Nadir Ould-Khessal/ Mr. Randy Brown