Download
1 / 10
100 likes | 189 Views
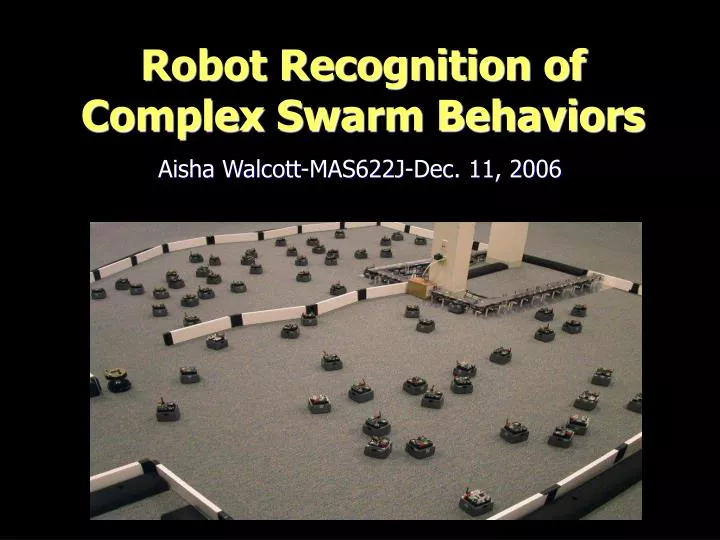
Aisha Walcott-MAS622J-Dec. 11, 2006. Robot Recognition of Complex Swarm Behaviors. Introduction. A Swarm is a large collection of autonomous mobile robots No centralized control Group behaviors are produced from local interactions of many individual robots

E N D
Aisha Walcott-MAS622J-Dec. 11, 2006 Robot Recognition of Complex Swarm Behaviors
Introduction A Swarm is a large collection of autonomous mobile robots No centralized control Group behaviors are produced from local interactions of many individual robots Goal is to develop a suite of primitive global behaviors that combine to form more complex group programs Dispersion Orbit Courtesy James McLurkin
source * source Project Goal Build multi-classifiers to classify Complex Swarm Behaviors Disperse Orbit Cluster Bubble Sort Example Features hi source low source
Approach • Collect raw behavior data sets • Determine Features (8D) • Pattern Recognition Algorithms • KNN • Neural Nets • Bayes Nets • Analyze results of each algorithm
KNN • Tested a range of values for nearest neighbors random tie break Overall Correct Classification Average Class Classification Cluster= 100% Disperse = 12.5% Clump = 50% Orbit = 44% Bubble Sort = 82%
Single Hidden Layer Layer 1: nodes [50,70] Max percent = 65% Logsig Two Hidden Layer Layer 1: nodes [50,70] Layer 2: nodes [25,25] Max percent = 65% Neural Nets
Bayes Nets • Mapping to discrete domain by applying k-means clustering to each feature Preliminary Results Classification of Cluster Possible bug in code Modify the discrete mapping Cluster, Disperse,Clump,Orbit, Bubble Sort 8 1 2
Discussion • KNN and Neural Net performed well • Determining the mapping from real numbers to a discrete domain may affect Bayes Nets classifiers • Overall high classification of clustering behavior • -Features tuned to behavior • -Not enough variety of samples • Need more samples of varying behavior
Next Steps • Feature selection-which group of features work best for each classifier • Additional experiments to determine why certain classifications are much better • Future • Use the temporal information to learn hidden emergent sub-behaviors