Download
1 / 29
300 likes | 561 Views
The Dynamics of the Pendulum. By Tori Akin and Hank Schwartz. An Introduction. What is the behavior of idealized pendulums? What types of pendulums will we discuss? Simple Damped vs. Undamped Uniform Torque Non-uniform Torque. Parameters To Consider. m-mass (or lack thereof) L-length

E N D
The Dynamics of the Pendulum By Tori Akin and Hank Schwartz
An Introduction • What is the behavior of idealized pendulums? • What types of pendulums will we discuss? • Simple • Damped vs. Undamped • Uniform Torque • Non-uniform Torque
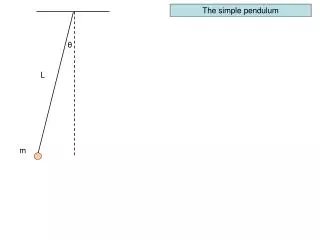
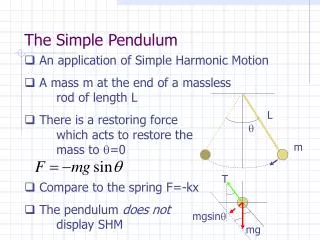
Parameters To Consider m-mass (or lack thereof) L-length g-gravity α-damping term I-applied torque Result: v’=-g*sin(θ)/L θ‘=v
Methods • Nondimensionalization • Linearization • XPP/Phase Plane analysis • Bifurcation Analysis • Theoretical Analysis
Nondimensionalization • Let ω=sqrt(g/L) and dτ/dt= ω • θ‘=v→v • v’=-g*sin(θ)/L →-sin(θ)
Systems and Equations • Simple Pendulum • θ‘=v • v‘=-sin(θ) • Simple Pendulum with Damping • θ‘=v • v‘=-sin(θ)- αv • Simple Pendulum with constant Torque • θ‘=v • v‘=-sin(θ)+I
Hopf Bifurcation • Simple Pendulum with Damping • θ‘=v • v‘=-sin(θ)- αv • Jacobian: • Trace=- α • Determinant=cos(θ) • Vary α from positive to zero to negative
The Simple Pendulum with Constant Torque and No Damping • The theta null cline: v = 0 • The v null cline: θ=arcsin(I) • Saddle Node Bifurcation I=1 • Jacobian: • θ‘=v • v‘=-sin(θ)+I
Driven Pendulum with Damping • θ’ = v • v’ = -sin(θ) –αv + I • Limit Cycle • The theta null cline: v = 0 • The v null cline: v = [ I – sin(θ)] / α • I = sin(θ) and as • cos2(θ) = 1 – sin2(θ) we are left with • cos(θ) = ±√(1-I2) • Characteristic polynomial- λ2 + α λ + √(1-I2) = 0 which implies λ = { ‒α±√ [α2- 4√(1-I2) ] } / 2 • Jacobian:
Non-uniform Torque and Damped Pendulum • τ’ = 1 • θ’ = v • v’ = -sin(θ) –αv + Icos(τ)
Results Thank You! • Basic Workings Various Oscillating Systems • Hopf Bifurcation-Simple Pendulum • Homoclinic Global Bifurcation-Uniform Torque • Chaotic Behavior • Saddle Node Bifurcation • Infinite Period Bifurcation • Applications to the real world