Download
1 / 18
180 likes | 238 Views
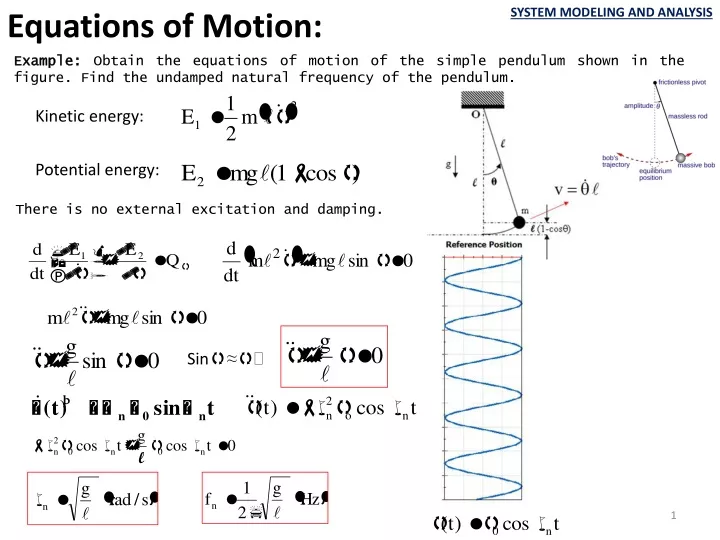
Equations of Motion:. SYSTEM MODELING AND ANALYSIS. Example: Obtain the equations of motion of the simple pendulum shown in the figure. Find the undamped natural frequency of the pendulum. Kinetic energy:. Potential energy:. There is no external excitation and damping. Sin ≈ .

E N D
Equations of Motion: SYSTEM MODELING AND ANALYSIS Example: Obtain the equations of motion of the simple pendulum shown in the figure. Find the undamped natural frequency of the pendulum. Kinetic energy: Potential energy: There is no external excitation and damping. Sin≈
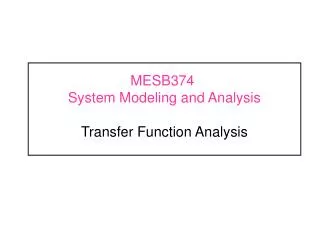
SYSTEM MODELING AND ANALYSIS O m, L, IO L1 g G L θ Example: Obtain the equations of motion of the compound pendulum shown in the figure. Find the undamped natural frequency. Kinetic energy: Potential energy: Where IO is the mass moment of inertia about point O. For small angular displacements sin θθ
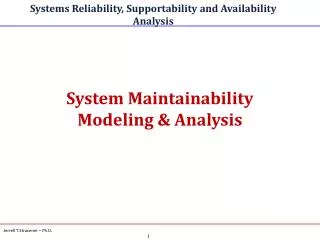
SYSTEM MODELING AND ANALYSIS L1=0.170299 m Material: Plain carbon steel
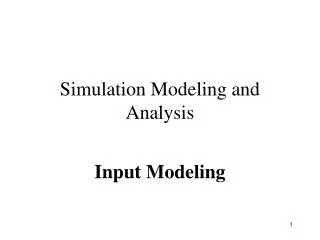
SYSTEM MODELING AND ANALYSIS 0.92 (s) 1.88 (s)
SYSTEM MODELING AND ANALYSIS Example: Obtain the equations of motion of the mechanical system shown in the figure. Yücel Ercan, İleri Dinamik 2014. M1 Solution: System has two degree of freedom, namely θ and x. x θ Bob Pendulum rod Tranlational mass Kinetic energy: Potential energy: Virtual work:
SYSTEM MODELING AND ANALYSIS Lagrange’s equation for θ: Kinetic energy: Potential energy: Virtual work:
Lagrange’s equation for x: (For constant M) In matrix form;
SYSTEM MODELING AND ANALYSIS Example: Obtain the equations of motion of the mechanical system shown in the figure. Solution: (Kinetic energy of the beam is zero due to its negligible mass) x Lagrange’s equation for θ:
SYSTEM MODELING AND ANALYSIS Lagrange’s equation for x: In matrix form;
SYSTEM MODELING AND ANALYSIS Example: Obtain the equations of motion of the mechanical system shown in the figure. G Inputs: f, T, x4 Outputs Potential energy of pendulum is neglected
SYSTEM MODELING AND ANALYSIS In matrix form:
(Free vibration) Eigenvalue equation EIGENVALUE EQUATION Eigenvalue equation:
Eigenvalue equation: m=0.85 kg, L =0.24 m, k=1200 N/m, c=20 Ns/m Matlab code: This value is different in the original presentation clc;clear m=0.85;l=0.24;k=1200;c=20; M=[m*l^2/8,0;0,3*m/4]; %Mass matrix C=[27*c*l^2/16,-9*c*l/4;-9*c*l/4,6*c]; %Damping matrix K=[9*k*l^2/8,-3*k*l/2;-3*k*l/2,4*k]; %Stiffness matrix syms s; %Symbolic variable definition mtr=M*s^2+C*s+K; p=solve(det(mtr)) %Eigenvalues of the system vpa(p,5) Eigenvalues: -34.163+39.572i, -34.163-39.572i, -44.572, -393.02
Eigenvalues: -34.163+39.572i, -34.163-39.572i, -44.572, -393.02 θh(t) = C1e(-34.163+39.572i)t + C2e(-34.163-39.572i)t + A2e-44.572t + A3e-393.02t (Complex coefficients)
p=-σ+iω iω ω0 φ -σ Real eigenvalues correspond to an exponential time response Complex eigenvalues correspond to an exponential-harmonic time response Form of the free vibration response: A1, φ1, A2 and A3 can be calculated from initial conditions The output reaches to zero as time t goes infinity. If the real parts of all eigenvalues are negative than the system is stable. rad/s For the root -44.572 Δt=0.0071, t∞=0.141 p=-σ For the root -393.02 Δt=0.0008 , t∞=0.016 Use smallest t and largest t For the system Δt=0.0008 , t∞=0.1839
x(t) x(t) 1 0.5 5 0.2 3 ξ=0.1 t t