Download
1 / 1
10 likes | 368 Views
AR Drone Luke Walsh, Jack Hammons, Mike Aspatore Instructors: Prof. Charles Bouman , Prof . Samuel Midkiff. Goal : Command the drone to complete various image processing based tasks using LabView. Labview Toolkit.

E N D
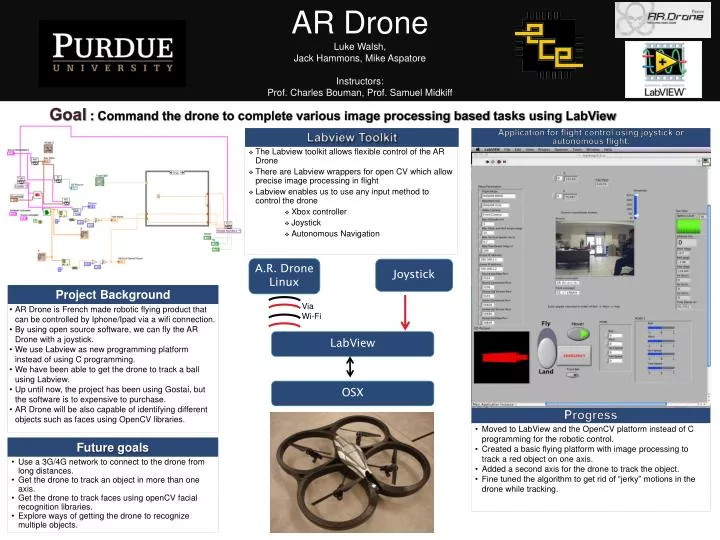
AR Drone Luke Walsh, Jack Hammons, Mike Aspatore Instructors: Prof. Charles Bouman, Prof. Samuel Midkiff • Goal : Command the drone to complete various image processing based tasks using LabView Labview Toolkit Application for flight control using joystick or autonomous flight. • The Labview toolkit allows flexible control of the AR Drone • There are Labview wrappers for open CV which allow precise image processing in flight • Labview enables us to use any input method to control the drone • Xbox controller • Joystick • Autonomous Navigation A.R. Drone Linux Joystick ProjectBackground Via Wi-Fi • AR Drone is French made robotic flying product that can be controlled by Iphone/Ipad via a wifi connection. • By using open source software, we can fly the AR Drone with a joystick. • We useLabview as new programming platform instead of using C programming. • We have been able to get the drone to track a ball using Labview. • Up until now, the project has been using Gostai, but the software is to expensive to purchase. • AR Drone will be also capable of identifying different objects such as faces using OpenCV libraries. LabView OSX Progress • Moved toLabView and the OpenCV platform instead of C programming for the robotic control. • Created a basic flying platform with image processing to track a red object on one axis. • Added a second axis for the drone to track the object. • Fine tuned the algorithm to get rid of “jerky” motions in the drone while tracking. Future goals • Use a 3G/4G network to connect to the drone from long distances. • Get the drone to track an object in more than one axis. • Get the drone to track faces using openCV facial recognition libraries. • Explore ways of getting the drone to recognize multiple objects.