Download
1 / 12
290 likes | 1.27k Views
Chapter 16 Planar Kinematics of a Rigid Body. Textbook: Engineering Mechanics- STATICS and DYNAMICS 11 th Ed., R. C. Hibbeler and A. Gupta Course Instructor: Miss Saman Shahid. Rigid Body Motion.

E N D
Chapter 16Planar Kinematics of a Rigid Body Textbook: Engineering Mechanics- STATICS and DYNAMICS 11th Ed., R. C. Hibbeler and A. Gupta Course Instructor: Miss SamanShahid
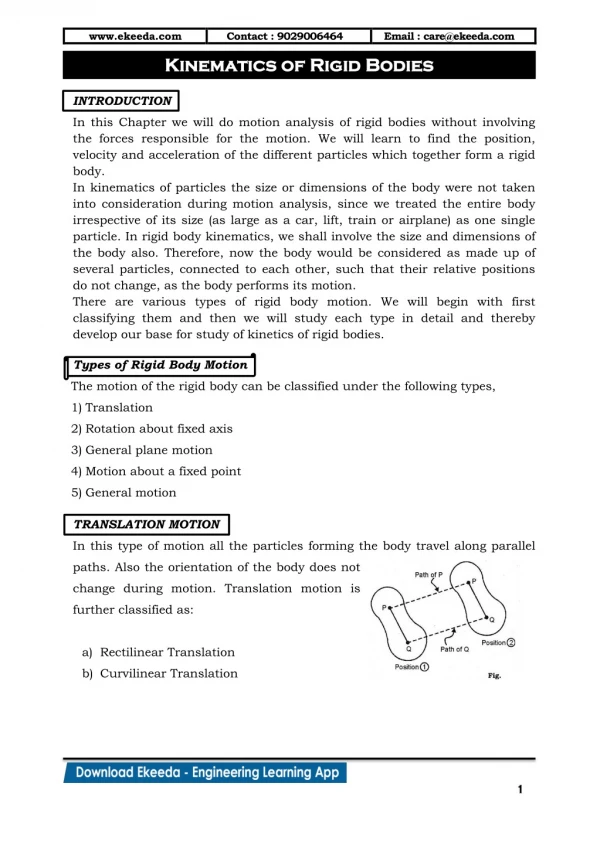
Rigid Body Motion The study of planar kinematics is important for the design of gears, cams and mechanisms used for many mechanical operations. When all the particles of a rigid body move along paths which are equidistant from a fixed plane, the body is said to undergo PLANAR MOTION. There are three types of rigid body planar motion: 1) Translational (rectilinear and curvilinear) 2) Rotation about a fixed axis 3)General plane motion.
1- Translation Translation: this type of motion occurs if every line segment on the body remains parallel to its original direction during the motion. When the paths of motion for any two particles of the body are along equidistance straight lines the motion is called rectilinear translation, and if the paths of motion are along curved lines which are equidistant the motion is called curvilinear translation.
2- Rotation About A Fixed Axis: When a rigid body rotates about a fixed axis, all the particles of the body, except those which lie on the axis of rotation, move along circular paths. 3) General Plane Motion: When a body is subjected to general plane motion, it undergoes a combination of translation and rotation. The translation occurs within a reference plane, and the rotation occurs about an axis perpendicular to the reference plane.
Translation-Position Consider a rigid body which is subjected to either rectilinear or curvilinear translation in the x-y plane. the location of points A and B in the body are defined from the fixed x,y reference frame by using position vectors rA and rB. The translating x’,y’ coordinate system is fixed in the body and has its origin located at A, hereafter referred to as the BASE POINT. The position of B with respect to A is denoted by the RELATIVE POSITION VECTOR r(B/A). By vector addition,
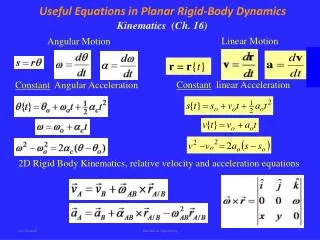
Translation: Velocity & Acceleration A relationship between the instantaneous velocities of A and B is obtained by taking the time derivative of the position equation, which yields: vB=vA Since these vectors are measured from x, y axes and the magnitude of rB/A is CONSTANT . Similarly: aB=aA(taking the time derivative of the velocity equation) The above two equations indicate: “all points in a rigid body subjected to either rectilinear or curvilinear translation move with the same velocity and acceleration”
Angular Dynamics When a body is rotating about a fixed axis, any point P located in the body travels along a circular path. Angular Motion: Consider the body shown and the angular motion of a radial line r located within the shaded plane and directed from O on the axis of rotation to point P. Angular Position: It is defined by the angle θ, measured between a fixed reference line and r. Angular Displacement: The change in the angular position, which can be measured as a differential dθ (in degrees of radians). 1rev=2π rad. right hand rule: “the fingers of the right hand are curled with the sense of rotation, so that in this case thumb, or dθ, points upward. If both θ and dθ are directed counterclockwise, and so the thumb points outward from the page.”
Cont. Angular Velocity: the time rate of change in the angular displacement is called the angular velocity ω= dθ/dt (in rad/s) Counterclockwise rotation is chosen as positive (and vice-versa). Angular Acceleration: it measures the time rate of change of the angular velocity. α=dω/dt The line of action of α is same as ω, however, its sense of direction depends on whether ω is increasing or decreasing. Eliminating ‘t’ between ω and αeuqations:
Constant Angular Acceleration If the angular acceleration of the body is constant, will yield a set of formulas which relate the body’s angular velocity, angular position, and time.
2-Rotation About a Fixed Axis Motion of point P: As the rigid body rotates point P travels along a circular path of radius r and center at O. Position: the position of P is defined by the position vector r, which extends from O to P. Velocity: the direction of v is tangent to the circular path. The fingers of the right hand are curled from ω toward r(p) and the thumb indicates the correct direction of v, which is tangent to the path in the direction of motion.
Cont. Acceleration (tangential): it represents the time rate of change in the velocity’s magnitude. If the speed of P increasing, then a(t) acts in the same direction as v; if the speed is decreasing, a(t) acts in the opposite direction of v; and finally, if the speed is constant, a(t) is zero. Acceleration (normal): it represents the time rate of change in the velocity’s direction. The direction of a(n) is always toward O, the center of the circular path.
Example The gears used in the operation of a crane all rotate about fixed axes. Engineers must be able to relate their angular motions in order to properly design this gear system.