Download
1 / 24
240 likes | 260 Views
Explore a parametric model for navigating in virtual environments, focusing on behavioral studies and intersection risk factors. Utilize a ribbon framework with paths to enhance accuracy, efficiency, and reliability in simulating roadways.

E N D
A Parametric Model for Oriented, Navigable Surfaces in Virtual Environments Hongling Wang Joseph Kearney Department of Computer Science University of Iowa
Virtual Environments as Behavioral Laboratories • Gaining widespread acceptance • Driving (Uc, Rizzo, Shi, Anderson, and Dawson, 2004; Lee, McGehee, Brown, & Reyes, in press) • Bicycling (Plumert, Kearney, & Cremer, 2004) • Navigating (Murray, Bowers, West, Pettifer, & Gibson, 2000; Warren, Tarr, & Kaebling, NEVLab; Bowman, Davis, Badre, & Hodges, 1999) • Advantages • Near natural • Highly controlled • Safe
Focus of Our Research • Behavioral Studies • Risk Factors for Intersection Crossing • Temperament • Adjustment to Change • Validation Studies • Distance and Motion Perception • Building VE to Support Behavioral Studies • Scenario Control and Behavior Modeling • Vehicles and Pedestrians • Database Modeling • Data Analysis Tools
Virtual Environment • Three 10X8 ft screens (rear projection) • Electrohome DLV projectors -1280x1024 pixels/screen • Square (Cave-like) configuration • Seven networked PCs • Dynamic pedal torque
Roadway Modeling(Willemsen, Kearney, Wang, IEEE VR 2003) • Roads as Ribbons • Oriented Surface • Smooth Strips • Twist and turn in space • Central Axis • Arc-length parameterized curve • Twist Angle • Linked through Intersections
Ribbon • Ribbon coordinate system • Distance, Offset, and loft (D,O,L) • Efficient Mapping (D,O,L) (X,Y,Z) • Egocentric frame of reference
Ribbon Centerline • Modeled by cubic spline Q(t)=(x(t),y(t),z(t)) • Arc-length parameterization • Compute arc length s=A(t) • Compute the inverse function t=A-1(s) • Substitute A-1(s) for t P(s)=(x(A-1(s)),y(A-1(s)),z(A-1(s)))
Arc-length Parameterization • Generally A(t)does not integrate A(t) = • Hence, A-1(s) is not an elementary function • Numeric methods impractical in real-time Solution: Approximately arc-length parameterized cubic spline curve
Approximately Arc-length Parameterized Cubic Spline Curve • Interpolate n input points • Compute length of input curve • Find m+1 equally spaced points on input curve: 0,t1, t2,…,tm-1,m • Interpolate the equally space points to derive a new cubic spline curve
Registration of Slant Curve • Compute the slant cubic spline Q(t) • Based on slant at n input points • Evaluate Q(t) at 0,t1,t2,…tm-1,m • Interpolate Q(t), Q(t1), Q(t2),… Q(tm) to derive a new slant spline that corresponds to the arc-length parameterized ribbon axis
Errors Analysis • Match error • Misfit between the derived and input curves • Measured by difference between the two curves at corresponding points, |Q(A-1(s))-P(s)| • Arc-length parameterization error • Deviation of the derived curve from arc-length parameterization • Measured by formula
Experimental Results (1) m=5 (2) m=10 Experimental curve(blue) and the derived curve (red) with their knot points
Experimental Results (cont.) (1) m=5 (2) m=10 Match error of the derived curve
Experimental Results (cont.) (1) m=5 (2) m=10 Arc-length parameterization error of the derived curve
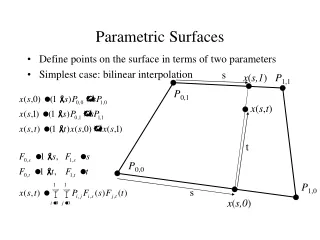
A parametric model for ribbons • A perpendicular line passes through any point on the ribbon • Intersects the central axis at x(s),y(s),z(s) • Parametric surface model
Mapping between Ribbon and Cartesian coordinates • Some computations are most naturally expressed in Cartesian coordinates (D,O,L) • Kinematics code computing object motion • Other computations require object locations expressed in ribbon coordinates (X,Y,Z) • Behavior code tracking roads • Efficient and robust code to map between ribbon and Cartesian coordinates
Intersections—Where Roads Join • Shared regions • Non-oriented • Corridors connect incoming and outgoing lanes • Single lane ribbons • Annotated with right-of-way rules
Ribbon to Ribbon Transitions • Problem: Tangle of Ribbons Bookkeeping Tedious and Error Prone • Possible switch in orientation • Possible shift in alignment • Solution:Paths • Composite ribbons
Path • One-lane Overlay • Removes transitions between ribbons • Immediate Plan of Action • Highly dynamic • Natural frame of reference
Results • Robust and Efficient Code • Daily use • Very reliable • Controllable Accuracy • Flexible • Roadways • Complex Intersections
Summary • Ribbon Framework • Natural frame of reference • Local orientation explicit • Relative distances simple to compute • Intersections • Paths • Short-term • immediate actions
Acknowledgments • NSF Support: INT-9724746, EIA-0130864, and IIS-0002535; National Center for Injury Prevention and Control: R49/CCR721682 • Contributing students, staff, faculty Jim CremerJodie Plumert Hongling Wang Geb Thomas David Schwebel Pete Willemsen Penney Nichols-Whitehead Scott Davis Jennifer Lee Steffan Munteanu Sarah Rains Joan Severson Sara Koschmeder Tom Drewes Ben Fraga Forrest Meggers Kim Schroeder Paul Debbins Stephanie Dawes Bohong Zhang Lloyd Frei Zhi-hong Wang Keith Miller Xiao-Qian Jiang