Download
1 / 44
440 likes | 709 Views
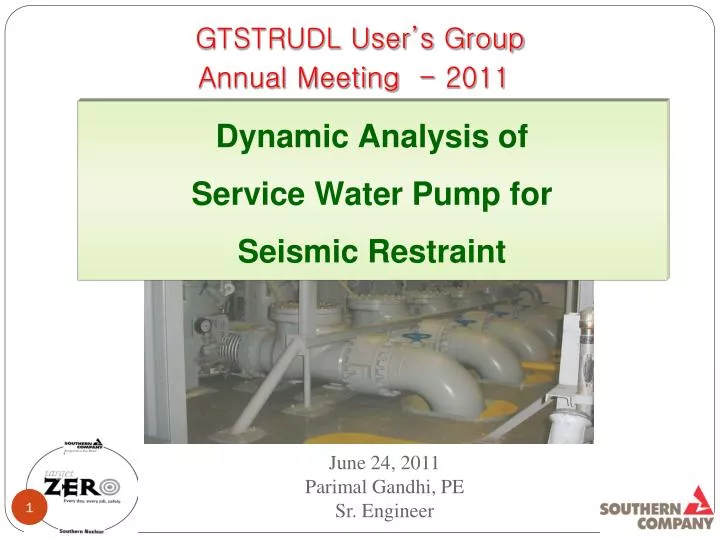
GTSTRUDL User’s Group. Annual Meeting - 2011. Dynamic Analysis of Service Water Pump for Seismic Restraint. June 24, 2011 Parimal Gandhi, PE Sr. Engineer. PURPOSE. Dynamic Analysis of Service Water Pump to Evaluate Seismic Loads on the Restraint . AND

E N D
GTSTRUDL User’s Group Annual Meeting - 2011 Dynamic Analysis of Service Water Pump for Seismic Restraint June 24, 2011Parimal Gandhi, PE Sr. Engineer
PURPOSE • Dynamic Analysis of Service Water Pump to Evaluate Seismic Loads on the Restraint. • AND • NRC Reg. Guide 1.92 & NRC Gupta Method for Missing Mass Impact on Seismic Loads.
AGENDA • Background of Plant Service Water System, Pump, and Seismic Restraint. • Failure of Seismic Restraint. • Dynamic Analysis of SW Pump With and Without Seismic Restraint. • Impact of NRC Reg.Guide 1.92, Rev. 2 on SW Pump Dynamic Analysis. • Conclusion.
BACKGROUND PLANT SERVICE WATER SYSTEM The Service Water Pond covers approximately 94 surface acres, and is required to provide adequate cooling for 30 days following an accident.
BACKGROUND PLANT SERVICE WATER SYSYEM • The Plant Service Water System is designed to: • Withstand the design basis earthquake (DBE) without impairing its function. • Have sufficient capacity and redundancy to provide reliable cooling. • Be operable during loss-of-offsite power
BACKGROUND SW PUMP The SW pumps' capable to withstand a design basis earthquake (DBE) without a loss of function. If the seismic restraints are degraded to the point that their design function can-not be met, then the associated SW pumps may not be able to withstand a DBE.
BACKGROUND SW PUMP PUMP MOTOR DISCHARGE HEAD ASSEMBLY PUMP BASE PLATE COLUMN ASSEMBLY SEISMIC RESTRAINT BOWL ASSEMBLY
BACKGROUND SEISMIC RESTRAINT
FAILURE SEISMIC RESTRAINT
FAILURE SEISMIC RESTRAINT • CORROSION • MAINTANCE LOAD (VERTICAL) • ZERO GAP FOR LATERAL RESTRAINT
EXAMPLE: STRUDL Math Model For Pump With Seismic Restraint 20- FLOOR PUMP BASEPLATE 17- UPPER SEISMIC RESTRAINT 12 - LOWER SEISMIC RESTRAINT
RESPONSE SPECTRA CURVE EAST-WEST
STORING RESPONSE SPECTRA EAST-WEST
RESPONSE SPECTRA CURVE VERTICAL
STORING RESPONSE SPECTRA VERTICAL
RESPONSE SPECTRA CURVE NORTH-SOUTH
STORING RESPONSE SPECTRA NORTH-SOUTH
Reg.Guide Rev.1: TOTAL = [(LOAD1-Z) 2 + (LOAD2-X) 2 +(LOAD3-Y) 2 ]1/2 NRC REG. GUIDE 1.92 Rev.1 LOADING
SUPPORT REACTIONS & DISPLACEMENT WITH SEISMIC RESTRAINT Reg.Guide Rev.1: TOTAL = [(LOAD1-Z) 2 + (LOAD2-X) 2 +(LOAD3-Y) 2 ]1/2 UNITS: FORCE LBS, MOMENT IN-LBS UNITS: DISPACEMENT INCH, ROTATION RAD
STRUDL MATH MODEL FOR PUMP WITHOUT SEISMIC RESTRAINT 20- FLOOR PUMP BASEPLATE
SUPPORT REACTIONS & DISPLACEMENT WITHOUT SEISMIC RESTRAINT Reg.Guide Rev.1: TOTAL = [(‘LOAD1-Z’) 2 + (‘LOAD2-X’) 2 +(‘LOAD3-Y’) 2 ]1/2 UNITS: FORCE LBS, MOMENT IN-LBS UNITS: DISPACEMENT INCH, ROTATION RAD
NRC Reg Guide 1.92, Rev 1 • Missing Mass Positions All modes are assumed to be out-of-phase with the ground acceleration and out-of-phase with each other All modes having frequencies ≤ “significant” frequency If frequencies are not closely spaced: SRSS Mode Combination Method
Mid Frequency Transition from Out-of-Phase to In-Phase Response Low Frequency Out-of-Phase Response High Frequency In-Phase Rigid Static Response Frequency • NRC GUPTA METHOD • Missing Mass Positions • NRC Reg Guide 1.92, Rev 2 F1 = frequency at which peak spectral acceleration is observed F2 = frequency above which the SDOF (modal) oscillators are in-phase with the transient acceleration input used to generate the spectrum and in phase with each other FZPA = frequency at which the spectral acceleration returns to the zero period acceleration; maximum base acceleration of transient acceleration input used to generate the spectrum
NRC GUPTA METHOD • Missing Mass Positions • NRC Reg Guide 1.92, Rev 2 • For each mode i, in each ground motion direction k, the response is separated into a periodic part and a rigid part: • The periodic modal response portions are combined using a double sum rule:
NRC GUPTA METHOD • Missing Mass Positions • NRC Reg Guide 1.92, Rev 2 • The rigid modal responses are combined algebraically, • including the residual rigid contribution from the missing mass: • The total response in each ground motion direction is computed from the SRSS of the modal combinations of the periodic and rigid responses:
Missing Mass • NRC Reg Guide 1.92, Rev 2 NRC Reg.Guide Rev.2: TOTAL+MM = [(‘LOAD1-Z’+’Z-MAS’) 2 + (‘LOAD2-X’+’X-MAS’) 2 +(‘LOAD3-Y’+ ‘Y-MASS’) 2 ]1/2
NRC Gupta Method • Reg Guide 1.92, Rev 2
NRC Gupta Method • Reg Guide 1.92, Rev 2
NRC Gupta Method • Reg Guide 1.92, Rev 2
NRC Gupta Method • Reg Guide 1.92, Rev 2 ‘GUP-ZT’= [(‘ZR’+’ZPMM’) 2 + (‘Z-PERDC’) 2]1/2 ‘GUP-XT’= [(‘XR’+’XPMM’) 2 + (‘Z-PERDC’) 2]1/2 ‘GUP-YT’= [(‘YR’+’YPMM’) 2 + (‘Z-PERDC’) 2]1/2 ‘GUP-TOTL’= [(‘GUP-ZT’) 2 + [(‘GUP-XT’) 2 + (‘GUP-YT’) 2]1/2
Missing Mass Positions • NRC Reg Guide 1.92, Rev 1 & 2 • NRC Gupta Method Reg.Guide Rev.1: TOTAL = [(‘LOAD1-Z’) 2 + (‘LOAD2-X’) 2 +(‘LOAD3-Y’) 2 ]1/2 NRC Reg.Guide Rev.2: TOTAL+MM = [(‘LOAD1-Z’+ ‘Z-MAS’) 2 + (‘LOAD2-X’+ ‘X-MAS’) 2 +(‘LOAD3-Y’+’Y-MASS’) 2 ]1/2 ‘GUP-TOTL’= [(‘GUP-ZT’) 2 + [(‘GUP-XT’) 2 + (‘GUP-YT’) 2]1/2
NRC Reg Guide 1.92, Rev 1, 2 & Gupta Method • Missing Mass Positions FREQUENCY SPECIFICATONS O TO 900 NUMBER OF MODES 50 Acceleration Frequency
NRC Reg Guide 1.92, Rev 1 & 2 • Missing Mass Positions
Missing Mass Positions • NRC Reg Guide 1.92, Rev 1 & 2 • NRC Gupta Method Reg.Guide Rev.1: TOTAL = [(‘LOAD1-Z’) 2 + (‘LOAD2-X’) 2 +(‘LOAD3-Y’) 2 ]1/2 NRC Reg.Guide Rev.2: TOTAL+MM = [‘(LOAD1-Z’+ ‘Z-MAS’) 2 + (‘LOAD2-X’+ ‘X-MAS’) 2 +(‘LOAD3-Y’+ ‘Y-MASS’) 2 ]1/2 ‘GUP-TOTL’= [(‘GUP-ZT’) 2 + [(‘GUP-XT’) 2 + (‘GUP-YT’) 2]1/2
Missing Mass Positions • NRC Reg Guide 1.92, Rev 1 , 2 & NRC GUPTA Method Reg. Guide 1.92, Rev. 1: X LOAD 2 Reg.Guide Rev.2: TOTAL-X = [(X LOAD2) 2 + (MM LOAD2) 2]1/2 NRC Gupta Method: GUP XT = [(X RIGID+MM-XPERD) 2 + ( X PERDC) 2]1/2
CONCLUSION • Seismic Restraint : To Reduce Pump Deflection and Stresses • No Impact of NRC Reg.Guide 1.92, Rev. 2 on Pump Dynamic Analysis
THE END Questions? Thank you.