Download
1 / 65
650 likes | 785 Views
CONVEX POLYTOPES. Gleb Kodinets. GALE TRANSFORM. GALE TRANSFORM. בדומה לטרנספורם דואלי טרנספורם גאיל מעביר קונפיגורציה גאומטרית אחד לקונפיגורציה גאומטרית אחרת. המציאו אותו כדי ללמוד יותר את פאונים הקמורים ממימד גבוה יותר טוב.

E N D
CONVEX POLYTOPES Gleb Kodinets
GALE TRANSFORM • בדומה לטרנספורם דואלי טרנספורםגאיל מעביר קונפיגורציה גאומטרית אחד לקונפיגורציה גאומטרית אחרת. המציאו אותו כדי ללמוד יותר את פאונים הקמורים ממימד גבוה יותר טוב. • טרנספורםגאיל קשור גם לדואליות של תיכנות ליניארית, אבל לא נדבר על זה היום.
Gale Transform • The Gale transform assigns to a sequence =(,,) of n ≥d+1 points in another sequence of n points. The result points=(,, ) live in a different dimension, namely in . For example, n points in the plane are transformed to n vectors in .
Gale transform operates on sequences, not individual points: We cannot say what is without knowing all of , , . • We also require that the affine hull of the be the whole ; otherwise, the Gale transform is not defined.
How to • In order to obtain the Gale transform of , we first convert the into (d+1)-dimensional vectors:∈ is obtained from by appending a (d+1)stcoordinate equal to 1.
Let A be the (d+1) x n matrix with:as the ith column. Since we assume that there are d+1 affinely independent points in a, the matrix A has rank d+1. • And so the vector space V generated by the rows of A is a (d+1)-dimensional subspace of . • We let be the orthogonal complement of V in ; that is, = {w ∈:<v,w>= 0 for all v ∈V}.
We have dim() = n-d-1. Let us choose some basis (, , ) of , and let В be the (n-d-1) x n matrix with as the jth row. Finally, we let ∈be the ith column of B. The sequence =(,, ) is the Gale transform of a. • Here is а pictorial summary:
Observation. • (i) The Gale transform is determined up to linear isomorphism In the construction of g, we can choose an arbitrary basis of . Choosing a different basis corresponds to multiplying the matrix В from the left by a nonsingular (n-d-1) x (n-d-1) matrix T and this means transforming (,, ) by a linear isomorphism of . .
Observation. • (ii) A sequence in is the Gale transform of some if and only if it spans and has 0 as the center of gravity:
Observation • (iii) Let us consider a sequence in satisfying the condition in (ii). If we apply the Gale transform to it, and apply the Gale transform the second time, we recover the original , up to linear isomorphism.
Two ways of probing a configuration • For a sequence = (, , of vectors in , we define two vector subspaces of : • Linear function – linear combination without constant(free coefficient)
Two ways of probing a configuration • For a point sequence = (, , , we then let AffVal() = LinVal() and AffDep() = LinDep(), where is obtained from as above, by appending 1's. Another description is • Affine function – linear combination with free coefficient
The knowledge of LinVal() tells us a lot about , and we only have to learn to decode the information. As usual, we assume that linearly spans all of • Each nonzero linear function →determines the hyperplane passing through 0. • {x ∈}
{x ∈} , → • This is oriented (one of its half-spaces is positive and the other negative), and the sign of () determines whether ( lies on , on its positive side, or on its negative side.
Let’s choose our favorite index set I⊆{1, 2,..., n}, and ask whether the points of the subsequence = (: i∈ I ) span a linear hyperplane. • First, we observe that they lie in a common linear hyperplane if and only if there is a nonzero φ∈LinVal() such that 0 for all i∈ I. • It could still happen that all of lies in a lower-dimensional linear subspace.
Using the assumption that spans , it is not difficult to see that spans a linear hyperplane if and only if all φ∈LinVal() that vanish on have identical zero sets; that is, the set {i: =0} is the same for all such φ. If we know that spans a linear hyperplane, we can also see how the other vectors in are distributed with respect to this linear hyperplane. • (,,,) I={2,4,5}
Similar information can be inferred from AffDep() (exactly the same information, in fact, since AffDep() = ). For an αϵAffDep() let (α) = {i∈{1,2, ...,n}: > 0} and (α) = {i∈ {1,2, ...,n}: < 0} . As we learned in the proof of Radon's lemma, and correspond to Radon partitions of . • AffDep() = :
Namely, and dividing = , we have convex combinations on both sides, and so conv() ∩conv()≠∅.For example, is a vertex of conv() if and only if there is no with ={i}.
Lemma • Let be a sequence of points in whose points affinely span , and let be its Gale transform. Then LinVal() = AffDep(a) and LinDep() = AffVal(a).
Proof • LinVal() = AffDep()
Proof • LinVal() = AffDep()
Dictionary of the Gale transform • (i)Lying in a common hyperplane For every (d+1)-point index set I ⊆ {1,2,..., n}, the points with i∈Ilie in a common hyperplane if and only if all the vectors with j ∉I lie in a common linear hyperplane. • (ii)General position In particular, the points of are in general position (no d+1 on a common hyperplane) if and only if every n-d-1 vectors among , … , span (which is a natural condition of general position for vectors).
Dictionary of the Gale transform. • (iii)Faces of the convex hull The points with i∈I are contained in a common facet of P =conv() if and only if 0 ∈conv{: j ∉ I}. In particular, if P is a simplicialpolytope, then its k-faces exactly correspond to complements of the (n-k-1)-element subsets of containing 0 in the convex hull. • (iv)Convex independence The form a convex independent set if and only if there is no oriented linear hyperplane with exactly one of the on the positive side.
Here is a picture of a 3-dimensional convex polytope with 6 vertices and the (planar) Gale transform of its vertex set. • For example, the facet is reflected by the complementary pair, of parallel oppositely oriented vectors, and so on.
Signs suffice. • As was noted above, in order to find out whether some is a vertex of conv(), we ask whether there is an α∈AffDep() with (α) = {i}. • Only the signs of the vectors in AffDep() are important here, and this is the case with all the combinatorial-geometric information about point sequences or vector sequences.
For such purposes, the knowledge of sgn(AffDep()) = {(sgn(),... ,sgn()): α∈AffDep()} is as good as the knowledge of AffDep(). • We can thus declare two sequences and combinatorially isomorphic if sgn(AffDep()) = sgn(AffDep()) and sgn(AffVal()) = sgn(AffVal()).
Here we need only one very special case: If = (,..., ) is a sequence of vectors, are positive real numbers, and ), then clearly, • and so and are combinatorially isomorphic vector configurations.
Affine Gale diagrams. • We have seen a certain asymmetry of the Gale transform: While the sequence is interpreted affinely, as a point sequence, its Gale transform needs to be interpreted linearly, as a sequence of vectors (with 0 playing a special role). Could one reduce the dimension of by 1 and pass to an "affine version" of the Gale transform? This is indeed possible, but one has to distinguish "positive" and "negative" points in the affine version.
Let be the Gale transform of some , ∈. Let us assume for simplicity that all the are nonzero. We choose a hyperplane h not parallel to any of the and not passing through 0, and we project the centrally from 0 into h, obtaining points ,... , ∈h ≅. If lies on the same side of 0 as , i.e., if = with > 0, we set = +1, and call a positive point.
For lying on the other side of 0 than we let 1 and we call a negative point. Here is an example with the 2-dimensional Gale transform from the previous drawing:
The positive are marked by full circles, the negative ones by empty circles, and we have borrowed the (incomplete) yin-yang symbol for marking the positions shared by one positive and one negative point. This sequence of positive and negative points in , or more formally the pair (,σ), is called an affine Gale diagram of .
It conveys the same combinatorial information as , although we cannot reconstruct from it up to linear isomorphism, as was the case with . (For this reason, we speak of Gale diagram rather than Gale transform.) One has to get used to interpreting the positive and negative points properly. If we put
Proposition (Dictionary of affine Gale diagrams) • Let be a sequence of n points in , let be the Gale transform of , and assume that all the are nonzero. Let (, σ) be an affine Gale diagram of in • (i) A subsequence lies in a common facet of conv() if and only if conv({: j∉I,= 1}) ∩({: j∉I,= -1}) ≠∅. • (ii) The points of are in convex position if and only if for every oriented hyperplanein , the number of positive points of on its positive side plus the number of negative points of on its negative side is at least 2.
So far we have assumed that ≠0 for all . This need not hold in general, and points =0 need a special treatment in the affine Gale diagram: They are called the special points, and for a full specification of the affine Gale diagram, we draw the positive and negative points and give the number of special points.
A nonrationalpolytope. • Configurations of k+4 points in have planar affine Gale diagrams. This leads to many interesting constructions of k-dimensional convex polytopes with k+4 vertices.
Example • 8-dimensional polytope with 12 vertices that cannot be realized with rational coordinates; that is, no polytope with isomorphic face lattice has all vertex coordinates rational. First one has to become convinced that if 9 distinct points are placed in R2so that they are not all collinear and there are collinear triples and 4-tuples as is marked by segments in the left drawing below, then not all coordinates of the points can be rational.
We declare some points negative, some positive, and some both positive and negative, as in the right drawing, obtaining 12 points. These points have a chance of being an affine Gale diagram of the vertex set of an 8-dimensional convex polytope, since condition is satisfied. • How do we construct such a polytope? For = (), we put = () ∈, choosing > 0 for positive and < 0 for negative , in such a way that . Then the Gale transform of is the vertex set of the desired convex polytopeP.
Let P' be some convex polytope with an isomorphic face lattice and let (g’, σ') be an affine Gale diagram of its vertex set a'. We have, for example, = because {. i= 7,10} form a facet of P', and similarly for the other point coincidences. The triple , (where is positive) is coUinear, because {. i≠ 1,8,12} is a facet. In this way, we see that the point coincidences and collinearities are preserved, and so no affine Gale diagram of P' can have all coordinates rational. At the same time, by checking the definition, we see that a point sequence with rational coordinates has at least one affine Gale diagram with rational coordinates. Thus, P cannot be realized with rational coordinates.
Consider a finite set P ⊂. For each point p ∈P, we define a region reg(p), which is the "sphere of influence" of the point p: It consists of the points x ∈for which p is the closest point among the points of P. dist(x, y) denotes the Euclidean distance of the points x and y. • The Voronoidiagram of P is the set of all regions reg(p) for p ∈P.
Here is an example of the Voronoidiagram of 2 points in the plane:
Here is an example of the Voronoidiagram of 3 points in the plane:
Here is an example of the Voronoidiagram of a point set in the plane:
Observation • Each region reg(p) is a convex polyhedron with at most |P|-1 facets. • Indeed, reg(p) is an intersection of |P| - 1 half-spaces.
For d = 2, a Voronoi diagram of n points is a subdivision of the plane into n convex polygons (some of them are unbounded). • It can be regarded as a drawing of a planar graph (with one vertex at the infinity, say), and hence it has a linear combinatorial complexity: n regions, O(n) vertices, and O(n) edges. • Euler’s formula: v+f=2+e
Examples of applications. • Voronoi diagrams have been reinvented and used in various branches of science. Sometimes the connections are surprising. • For instance, in archaeology, Voronoi diagrams help study cultural influences.
Examples of applications: "Post office problem" or nearest neighbor searching • Given a point set P in the plane, we want to construct a data structure that finds the point of P nearest to a given query point x as quickly as possible. This problem arises directly in some practical situations or, more significantly, as a subroutine in more complicated problems. The query can be answered by determining the region of the Voronoi diagram of P containing x. For this problem (point location in a subdivision of the plane), efficient data structures are known.
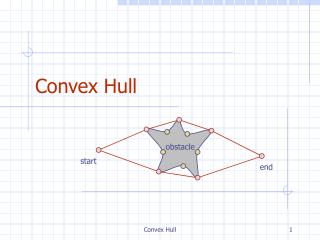
Robot motion planning • Consider a disk-shaped robot in the plane. It should pass among a set P of point obstacles, getting from a given start position to a given target position and touching none of the obstacles.