Download
1 / 26
260 likes | 279 Views
Explore classical mechanics, from Newton's laws to Lagrange and Hamilton frameworks. Review basic mechanics with advanced mathematical tools, delve into vectors, and tackle end-of-chapter problems.

E N D
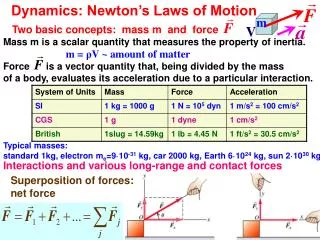
Physics 430: Lecture 1 Mass, Force, Newton’s Laws Dale E. Gary NJIT Physics Department
1.1 Classical Mechanics • First began with Galileo (1584-1642), whose experiments with falling bodies (and bodies rolling on an incline) led to Newton’s 1st Law. • Newton (1642-1727) then developed his 3 laws of motion, together with his universal law of gravitation. • This is where your previous experience in mechanics doubtless ends, but the science of mechanics does not end there, as you’ll see in this course. • Two additional, highly mathematical frameworks were developed by the French mathematician Lagrange (1736-1813) and the Irish mathematician Hamilton (1805-1865). • Together, these three alternative frameworks by Newton, Lagrange, and Hamilton make up what is generally called Classical Mechanics. • They are distinct from the other great forms of non-classical mechanics, Relativistic Mechanics and Quantum Mechanics, but both of these borrow heavily from Classical Mechanics.
This Course • The first part of this course will be a review in terms of the basic ideas of mechanics, which you should have already thoroughly learned in your introductory physics courses. • However, we will be looking again at the ideas with more advanced mathematical tools, and it is really these tools that we are trying to hone during the first 5 chapters. • The 6th chapter introduces some ideas from the Calculus of Variations that are the basis for the Lagrange formalism, which you will learn in chapter 7. • The Lagrange approach then becomes another of our mathematical tools for looking at more complex mechanical systems involving rotations of rigid bodies, oscillating systems, and so on, through chapter 11. • Unfortunately, we will not have time to study Hamilton’s approach, although I will try to get to it briefly in the final lecture.
1.2 Space and Time Ways of writing vector notation • We live in a three-dimensional world, and for the purpose of this course we can consider space and time to be a fixed framework against which we can make measurements of moving bodies. • Each point P in space can be labeled with a distance and direction from some arbitrarily chosen origin O. Expressed in terms of unit vectors • It is equivalent to write the vector as an ordered triplet of values • We can also write components of vectors using subscripts z axis y axis z x y x axis
Other Vector Notations • You will be used to unit vector notation i, j, k,but we will follow the text and use the notation. • At times, it is more convenient to use notation that makes it easier to use summation notation, so we introduce the equivalents: which allows us to write • In the above example, this form has no real advantage, but in other cases we will meet, this form is much simpler to use. The point is that we may choose any convenient notation, and you should become tolerant of different, but consistent forms of notation.
Vector Operations • Sum of vectors • Vector times scalar • Scalar product, or dot product • Vector product, or cross product q
y x q Fundamental Nature of the End-of-Chapter Problems • In the main chapter, just after equation (1.7), there is a note that says “see Problem 1.7 at the end of the chapter for a proof that ” • Problem 1.7 says: • Prove that the two definitions of the scalar product are equal. One way to do this is to choose your x axis along the direction of r. [Strictly speaking you should first make sure that the definition (1.7) is independent of the choice of axes. If you like to worry about such niceties, see Problem 1.16.] • This example shows that the problems are part of the text—even problems that are not assigned. Many of the problems guide you to further learning, and you are encouraged to try some of them. • With r along x, we have • Uses the fact that we are free to choose our axes without changing the result. But what about Problem 1.16?
Everything on the right is a length (squared), which is the same for any choice of axis, so the same is true of . Problem 1.16 • (a) Defining the scalar product by Equation (1.7), show that Pythagoras’s theorem implies that the magnitude of any vector . (b) It is clear that the length of a vector does not depend on our choice of coordinate axes. Thus, the result of part (a) guarantees that the scalar product , as defined by (1.7), is the same for any choice of orthogonal axes. Use this to prove that as defined by (1.7), is the same for any choice of orthogonal axes. [Hint: Consider the length of the vector ].
Lesson About the Problems • I cannot stress enough that doing problems is going to allow you to learn 10 times more than just reading the book. In the last problem, for example, we learned how to distribute dot products, how to express the length of a vector in terms of its dot product with itself, and generally how to deal with proofs in terms of simple, easy-to-do steps. • The problems are written in a way to help you discover the answers. You should pay attention to references in the text to the problems, and have a look at the problems for further understanding. • The problems I assign may assume knowledge you can only gain from following the thread from the text into the unassigned problems.
Differentiation of Vectors • This course makes heavy use of Calculus (and differential equations, and other forms of advanced mathematics). In general, we will refresh your memory about the techniques you will need as they come up, but we will do so from a Physics perspective—only paying lip-service to the underlying mathematical proofs. • What we need now is a simple form of something called Vector Calculus. As long as you remember that vectors are just triplets of numbers, and vector equations can be thought of as three separate equations, you will be fine. • For now, consider only the derivative of the position vector r(t), which you should know gives the velocity v(t) = dr(t)/dt. Likewise, the derivative of the velocity (the second derivative of the position) gives the acceleration: a(t) = dv(t)/dt = d2r(t)/dt2. Formally: for scalars: for vectors:
Differentiation of Vectors • By the usual rules of differentiation, the derivative of a sum of vectors is • and the derivative of a scalar times a vector follows the usual product rule • Also note: so implies that the unit vectors are constant (i.e. ). • However, we will find in other coordinate systems the unit vectors are NOT constant! How can this be?
m1 m2 1.3 Mass and Force • What is the difference between mass and weight? • Mass has to do with inertial force (ma). Weight has to do with gravitational force (mg). In the first case, the mass is “resistance to changes in motion” while in the second case it is a rather mysterious “attractive property” of matter. In fact, these two different properties of mass are identical, which is what Galileo’s experiments showed (dropping masses off the leaning tower of Pisa). But it was not understood until Einstein’s theory of General Relativity. • Inertial balance: Allows measurement of inertial mass without mixing in gravitational force. Try this in the Phun Physics Engine
Point Mass (Particle) • For now, we want to focus on the concept of a point mass, or particle. This is an approximation, which is worthwhile to look at carefully. It basically refers to a body that can move through space but has NO internal degrees of freedom (rotation, flexure, vibrations). • Later we will talk about bodies as collections of particles, or a continuous distribution of mass, and in considering such bodies the laws of motion are considerably more complicated. • Despite this being an approximation, the approximation is still useful in many cases, such as for elementary particles (protons, neutrons, electrons), or even planets and stars (sometimes).
1.4 Newton’s Three Laws • Law of Inertia • In the absence of forces, a particle moves with constant velocity v. • (An object in motion tends to remain in motion, an object at rest tends to remain at rest.) • Force Law • For any particle of mass m, the net force F on the particle is always equal to the mass m times the particle’s acceleration: F = ma. • Conservation of Momentum Law • If particle 1 exerts a force F21 on particle 2, then particle 2 always exerts a reaction force F12 on particle 1 given by F12 = - F21. • (For every action there is an equal and opposite reaction.)
Aside: Dot Notation • Dot Notation: • We will be using this dot notation extensively. It means differentiation with respect to time, t (only!). • You may have seen “prime” notation, but if the differentiation is not with respect to time, it is NOT equivalent to y-dot. • y-dot means dy/dt only.
Equivalence of First Two Laws • The Law of Inertia and the Force Law can be stated in equivalent ways. Obviously, if , then in the absence of forces • Thus, the velocity is constant (objects in motion tend to remain in motion) and could be zero (objects at rest tend to remain at rest). • The second law can be rewritten in terms of momentum: • In Classical Mechanics, the mass of a particle is constant, hence • So we can write . • In words, forces cause a change in momentum, and conversely any change in momentum implies that a force is acting on the particle.
The Equation of Motion • Newton’s Second Law is the basis for much of Classical Mechanics, and the equation has another name—the equation of motion. • The typical use of the equation of motion is to write where the right hand side lists all of the forces acting on the particle. • In this text, an even more usual way to write it is: which is perhaps an easier way to understand why it is called the equation of motion. This relates the position of the particle vs. time to the forces acting on it, and obviously if we know the position at all times we have an equation of motion for the particle.
Differential Equations • Most of you should have had a course in differential equations by now, or should be taking the course concurrently. • A differential equation is an equation involving derivatives, in this case derivatives of the particle position r(t). • Consider the one-dimensional equation for the position x(t) of a particle under a constant force: • This equation involves the second derivative (with respect to time) of the position, so to get the position we simply integrate twice: • This was so easy we did not actually need to know the theory of differential equations, but we will meet with lots of more complicated equations where the DiffEQ theory is needed, and will be introduced as needed.
Example: Problem 1.24 • Statement of Problem: • In case you haven’t studied any differential equations before, I shall be introducing the necessary ideas as needed. Here is a simple example to get you started. Find the general solution of the first-order equation df/dt = ffor an unknown function f(t). [There are several ways to do this. One is to rewrite the equation as df / f = dtand then integrate both sides.] How many arbitrary constants does the general solution contain? [Your answer should illustrate the important general theorem that the solution of any nth-order differential equation contains n arbitrary constants.] • Solution: • First note that we cavalierly treat df/dt as if it were a quotient with numerator and denominator, when it is really an operator d/dt operating on a function f. We get away with this by considering that so we do our manipulation before taking the limit
Example: Problem 1.24, cont’d • Solution, cont’d: • For the “well-behaved” functions we typically deal with in Physics, it is okay to do this. Mathematicians would scream, because the limit may not exist, or will behave badly, for some discontinuous functions, but in Physics we typically do not have to worry about that. • After taking the limit, the Df and Dt become “differentials” df and dt. • Once the equation is in the form it is easy to integrate both sides to get: with solution • Here “ln” is the natural logarithm, whose inverse is the exponential function e. The two arbitrary constants can be combined into a single constant c = c2-c1. Taking the “inverse log” of both sides: where I have introduced a new constant a = ec. So we are left with 1 constant for a 1st-order equation, agreeing with n constants for an nth-order equation.
Inertial Reference Frames • We saw in the example of problems 1.7 and 1.16 that we are free to choose our axes (our coordinate system) any way we wish. This is called a reference frame. • What may not be obvious is that we can even choose a reference frame that is moving (changing with time). In fact, it is pretty much impossible to do anything else. If we choose a reference frame fixed to a lab bench, for example, our reference frame is rotating with the Earth, orbiting the Sun, and moving around the galaxy. • We define an inertial frame as any non-accelerating frame (one moving at constant velocity—both magnitude and direction). In such frames, Newton’s first law holds—objects not subject to forces move in straight lines. • A non-inertial frame is one that is accelerating. In such a frame, objects not subject to forces appear to accelerate. We describe such effects as “fictitious” forces, which we’ll meet in Chapter 9—Centrifugal Force and Coriolis Force. • You’ll note that our lab bench frame is not inertial! It is accelerating as Earth moves. However, if our experiment does not take too long, and the distance over which we make our measurements is not too great, we can approximate the frame as inertial.
F1ext Fext1 Fext2 F2ext 1.5 The Third Law and Conservation of Momentum • Newton’s first two laws refer to forces acting on a single particle. The Third Law, by contrast, explicitly refers to two particles interacting—the particle being accelerated, and the particle doing the forcing. • Introduce notation F21 (F-on-by) to represent the force on particle 2 by particle 1. Then Newton’s Third Law If particle 1 exerts a force F21 on particle 2, then particle 2 always exerts a reaction force F12 on particle 1 given by F12 = -F21. 1 F12 F21 2
Multi-Particle Systems • It should be fairly obvious how to extend this to systems of N particles, where N can be any number, including truly huge numbers like 1023. • Let a or b designate one of the particles. Both a and b can take any value 1, 2, …, N. The net force on particle a is then where the sum runs over all particles except a itself (a particle does not exert a force on itself). • The total force on the system of particles is just the sum of all of the : • Each term Fab can be paired with Fba:
Conservation of Momentum • This final result: says that the internal forces on a system of particles do not matter—they all cancel each other, so the change in total momentum of a system of particles is only due to external forces. • In particular, if there are no external forces, the momentum cannot change, i.e. it is constant. This is the principle of conservation of momentum: • This is one of the most important results in classical physics, and is true also in relativity and quantum mechanics. • It may be helpful to write out the sums from the previous slide explicitly for 3 and 4 particles (Problems 1.28 and 1.29), to convince yourself of the pair-wise canceling of the internal forces. • We showed that Newton’s 3rd Law implies Conservation of Momentum. You can also show (Problem 1.31) that Conservation of Momentum implies Newton’s 3rd Law. Principle of Conservation of Momentum If the net external force Fext on an N-particle system is zero, the system’s total momentum P is constant.
Example: Problem 1.30 • Statement of Problem: • Conservation laws, such as conservation of momentum, often give a surprising amount of information about the possible outcome of an experiment. Here is perhaps the simplest example: Two objects of masses m1 and m2 are subject to no external forces. Object 1 is traveling with velocity v when it collides with the stationary object 2. The two objects stick together and move off with common velocity v. Use conservation of momentum to find v in terms of v, m1 and m2. • Solution: • Conservation of momentum says the momentum before the collision must be the same as the momentum after the collision: • Since v1 = v, and v2 = 0(second object is stationary), we simply solve for v to find:
Trying Things Out in Phun • Things to try: • Show why Aristotle thought that the natural state of things is “rest,” and why he thought “earth” bodies sought the ground while “air” bodies sought the heavens. • Show how Galileo was able to overcome the idea of Aristotle that the natural state was “rest,” which led to Newton’s 1st Law. • Show that by removing external forces one can observe conservation of momentum through collisions between two bodies.