Download
1 / 16
160 likes | 297 Views
Programmable Self-Assembly. “Programmable Self-Assembly Using Biologically-Inspired Multiagent Control”, R. Nagpal, ACM Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS), Bologna, Italy, July 2002. And

E N D
Programmable Self-Assembly “Programmable Self-Assembly Using Biologically-Inspired Multiagent Control”, R. Nagpal, ACM Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS), Bologna, Italy, July 2002. And “Programmable Self-Assembly: Constructing Global Shape Using Biologically-Inspired Local Interactions and Origami Mathematics”, Radhika Nagpal, PhD Thesis, MIT Artificial Intelligence Laboratory Technical Memo 2001-008, June 2001. Prashanth Bungale October 26, 2004
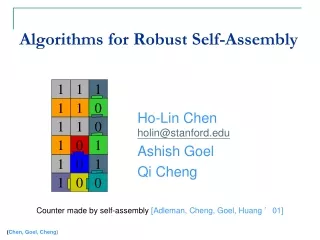
Significantly different approach to the design of self-organizing systems: the desired global shape is specified using an abstract geometry-based language, and the agent program is directly compiled from the global specification. Programmable Self-Assembly: Global Shape Formation
Overview Epithelial Cell Morphogenesis And Drosophila Cell Differentiation Geometry and Origami Mathematics Achieving a Global Action using Local Behavior and Interactions Generative Program Instructing in terms of Global Actions Robust, Programmable Shape Formation
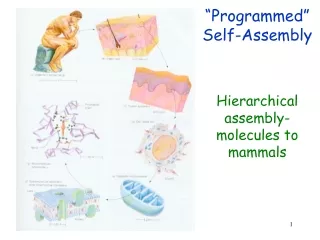
Lessons from Developmental Biology • Complex structures from cells with identical DNA • Emergent global consequences from strictly local interactions Lessons from Origami Mathematics and Geometry • Generative program for scale-independent shape formation using geometry-based language • Simple, yet expressive enough to generate wide variety of shapes and patterns
Cell computation model • Autonomous • Identical program • Local communication • Local sensing, actuation • Limited resources, no global identifiers • No global coordinates • No global clock
Biologically Inspired Primitives • Gradients: • Neighborhood Query: • Polarity Inversion: • Cell-to-cell Contact: • Flexible Folding: fold apical or basal surface
Robustness • Cell programs are robust • Axioms produce reasonably straight and accurate lines • Scale Independence • Without relying on: • regular grids, • global coordinates, • unique global identifiers, or • synchronous operation • Robustness achieved by: • Large and dense populations (expected neighbors > 15), depending on average behavior, no centralized control
Accuracy decreases as: Length of crease Distance between sources increases Spatial Variance of Error Interference between gradients from two sources. The concentric bands represent the radially-symmetric uncertainty in distance estimates from a gradient from a sincgle source. The composition of two gradients causes the error to vary spatially.
Analysis of Resource Consumption • Resource consumption • Cell code conservation
Limitations • No compilation has been specified for axioms A5 and A6. • Not completely free of centralized control or global coordinates • p1, l1, etc. • Not entirely identical cell programs • A combination of pre-programmed internal state and case-based programming (“if c1 (…)”, “if c3 (…)”, etc.) can always make up for specialized programs. • Not completely Asynchronous • Global Barrier Synchronization during each fold / crease completion • Calibrated estimate used during distributed crease formation • Failure of shape formation sometimes possible due to: • Failure of entire groups of cells forming points or lines, and large regional failures or holes • Failure of barrier synchronization across axioms • Gradient (and thus, region) leakage (caused due to discontinuity of cells) • Absence of cells at intersections (caused due to insufficiently dense cells and wide creases) • Large spatial variance of error • Malicious Cells