Download
1 / 29
310 likes | 663 Views
SOIS and Software Reference Architecture. F. Torelli DASIA 2011 - Malta 17/05/2011. Outline. SOIS architecture and services SOIS architecture and Avionics System Reference Architecture Impacts to the design of flight software Status of SOIS publications and related developments Conclusions.

E N D
SOIS and Software Reference Architecture F. TorelliDASIA 2011 - Malta17/05/2011 ESA UNCLASSIFIED – For Official Use
Outline • SOIS architecture and services • SOIS architecture and Avionics System Reference Architecture • Impacts to the design of flight software • Status of SOIS publications and related developments • Conclusions ESA UNCLASSIFIED – For Official Use
SOIS architecture and services ESA UNCLASSIFIED – For Official Use
Standard Services Standard Services ECSS Standard Protocols CCSDS SOIS Architecture SOIS provides an abstraction of the functionality of the spacecraft units in a layered fashion. ESA UNCLASSIFIED – For Official Use
Sub-Network Services Sub-network services: • abstract from the physical location (within the spacecraft) of the unit to be accessed • abstract from the datalink protocol required by a specific communication media to access a unit • abstract from time constrains strictly related to the specific communication media used to access a unit • abstract from the addressing scheme required by a specific communication media to identify a unit. ESA UNCLASSIFIED – For Official Use
Command & Data Acquisition Services Command & Data Acquisition services: • abstract from the protocol required to control the device (Device Access Service) • abstract from the type of communication service (i.e. memory access, packet-base) required to access the device (Device Access Service) • abstract from time constrains strictly related to the device specific access protocol (Device Access Service) • decouple device physical access from device data consumption by the applications (Device Data Pooling Service) • add ontology to the raw command and data information related to devices (Device Virtualisation Service) • provide a uniform interface for each class of devices, independent from their actual implementation (Device Virtualisation Service). ESA UNCLASSIFIED – For Official Use
Other Application Support Services Time Access Service: • abstracts from the mechanisms required to access the on-board reference time and to handle time alarms. Message Transfer Service: • provides a high level and uniform mechanism to communicate between software applications within the spacecraft. File and Packet Store Service: • provides a standardised interface to mass memory file and packet stores • abstracts from the implementation details related to the mass memory file systems. ESA UNCLASSIFIED – For Official Use
Plug and Play Services Plug and Play Services: • provide mechanisms to discovery and configure devices connected to a sub-network • provide mechanisms to handle units redundancy • provide the means to interpret the content of Electronic Data Sheets and to configure the other services accordingly (C&DA). ESA UNCLASSIFIED – For Official Use
Protocols supporting the Services The services are complemented by protocols implement the functionality specified by SOIS. Sub-Network Protocols: • Mil-Std-1553, ECSS-E-ST-50-13C • CAN, ECSS-E-ST-50-15C draft • Spacewire, ECSS-E-ST-50-52 (RMAP), ECSS-E-ST-50-XX (SpW-D) Message Transfer Service Protocol: • Asynchronous Message Service, CCSDS 735.1-B-0 File and Packet Store Service Protocols: • Network File Access, Network Packet Access and Remote Block Storage Protocols need to be standardised TBD AMS ESA UNCLASSIFIED – For Official Use
SOIS and Avionics System Reference Architecture ESA UNCLASSIFIED – For Official Use
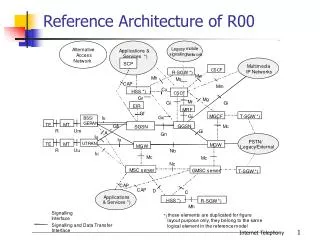
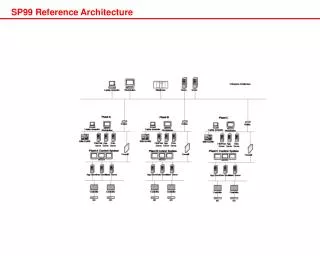
Application BB (mission dependent) AOCS Plan/ Autonomy Framework Satellite Confand Eqpt Mgmt Thermal System mode mgmt Power Central FDIR SSMM Mgmt OBT Mgmt P/L Manager Software bus Execution platform PUS specific Abstract component services Component services Connector services Container services PUS and MTL services OBCP interpreter Communication services addressing physical distribution across nodes = SOIS MTS Context Mgmt RTOS Standardized devices Legacy devices PUS monitoring On-board time=SOIS TAS Avionics Equipmentvirtual devices =SOIS DVS TM/TC SSMM Payloads &Instruments Intelligent devices BSP Libraries:mathematical, etc. SOIS Subnetwork layer (1553, CAN, SpW) (including HDSW) Solid StateMassMemoryFile/ Compress/Encrypt SecurityUnit Sensorandactuators OBC Hardware SpaceLinux CPU/ NGmP OBTimer RTU/Intelligent IO ADCs / DACs SGM CAN MIL-1553 RAM DSP PayloadComputer HWwatchdog Digital Sensorbus BootPROM SOIS Layers SpW EEPROM SOIS Layers SOIS Layers RS422 Onboard Communications H/W(e.g. MIL-STD-1553B, SpaceWire, CAN RS422) Avionics System Reference Architecture ESA UNCLASSIFIED – For Official Use
SOIS in the Avionics System Reference Architecture 1/2 On-Board Computer (OBC): The full set of SOIS services is intended for implementation in the OBC flight software as part of the Execution Platform building block. Other Equipments: A reduced subset of SOIS service is foreseen for the external units such as RTUs, Solid State Mass Memory, Intelligent Sensors and Actuators, Payloads in accordance with their functionality and supported features. ESA UNCLASSIFIED – For Official Use
Application BB (mission dependent) AOCS Plan/ Autonomy Framework Satellite Confand Eqpt Mgmt Thermal System mode mgmt Power Central FDIR SSMM Mgmt OBT Mgmt P/L Manager Software bus Execution platform PUS specific Abstract component services Component services Connector services Container services PUS and MTL services OBCP interpreter Communication services addressing physical distribution across nodes = SOIS MTS Context Mgmt RTOS Standardized devices Legacy devices PUS monitoring On-board time=SOIS TAS Avionics Equipmentvirtual devices =SOIS DVS TM/TC SSMM Payloads &Instruments Intelligent devices BSP Libraries:mathematical, etc. SOIS Subnetwork layer (1553, CAN, SpW) (including HDSW) Solid StateMassMemoryFile/ Compress/Encrypt SpaceLinux SecurityUnit Sensorandactuators OBC Hardware CPU/ NGmP OBTimer PayloadComputer RTU/Intelligent IO ADCs / DACs SGM CAN MIL-1553 RAM DSP HWwdog Digital Sensorbus BootPROM SOIS Layers SpW EEPROM SOIS Layers SOIS Layers RS422 SOIS Layers Onboard Communications H/W(e.g. MIL-STD-1553B, SpaceWire, CAN RS422) SOIS in the Avionics System Reference Architecture 2/2 ESA UNCLASSIFIED – For Official Use
Impacts to the design of flight software ESA UNCLASSIFIED – For Official Use
Traditional Flight Software In a traditional flight SW system, AOCS and equipment time requirements defining the bus schedule also drive the flight SW architecture and the SW tasks schedule. The system is designed as a “monolithic” entity tailored for the specific mission. Bus and ASW Time Domain Mixed Payload 2 Manager OBCP Interpreter MTL Manager MTL Manager AOCS Processing EEPROM Manager Science TM Processing Scrubbing TC Manager Payload 1 Manager HK TM Processing HK TM Processing HK TM Processing Mass Memory Monitoring Mode Manager MilBus Manager MilBus Manager MilBus Manager MilBus Manager MilBus Manager MilBus Manager AOCS Acquisitions Payload 1 Acquisitions Payload 2 Commanding AOCS Commanding Large Data Transfer Payload 2 Acquisitions Minor Frame 0 (125 msec) Minor Frame 1 (125 msec) Minor Frame 2 (125 msec) Minor Frame 3 (125 msec) … Minor Frame 6 (125 msec) Minor Frame 7 (125 msec) t Major Frame (1 sec) ESA UNCLASSIFIED – For Official Use
Motivations for an Improvement Such a synchronous schedule works to accomplish relatively simple mission requirements, however: • to improve the development process, • to accommodate more functions on board, • to enable new emerging technologies (e.g. multi-core processors, time and space partitioning, increased autonomy) It is advisable to move towards an avionics architecture based on composable building blocks where functional and timing requirements, if possible, are addressed at component level (separation of concerns). ESA UNCLASSIFIED – For Official Use
Proposed Way Forward SOIS Services: The introduction of the previously mentioned SOIS standardised services supports this approach allowing to decouple the functional and timing requirements strictly related to the communication protocols from the ones related to the device access protocols and again from the ones related to the applications algorithms. These concepts will be briefly discussed for: • Sub-Network Services • Command & Data Acquisition Services • Message Transfer Service. ESA UNCLASSIFIED – For Official Use
Sensor Max Latency Command Accuracy AOCS Frequency AOCS Algorithm Duration Sensor Max Latency Command Accuracy Sensor Max Latency Command Accuracy Service Time and Functional Characterisation Sub-Network Service Primitives Bus Profile Bus Protocol Sensor Access Time Equipment Physical Address Bus Bandwidth Allocation Traffic Scenario for the Nodes Actuators Access Time Sensor Access Time Equipment Physical Address Actuators Access Time Sensor Access Time Equip. Physical Address Actuators Access Time Sub-Network Services Characterisation Low level communication req. can be captured in the sub-network layer to define the bus profile and to expose to the upper layers of the flight software functional and non-functional attributes of the services primitives. ESA UNCLASSIFIED – For Official Use
Calib. Curves Engineering Data Format Device Required Interface Service Time and Functional Characterisation Electronic Data Sheet Device Virtualisation Service Common Data Dictionary Device Enumeration Service Device Access Service Raw Command/Acquisition Sequence Sub-Net Service Timing Raw Data Format Device Access Req. Command & Data Acquisition Services Characterisation The requirements related to the mechanisms to access the on-board devices can also be isolated within the C&DA services group, mainly in DAS and DVS. The services can be automatically configured and instantiated during the design phase based on the description of the EDS and provide a well characterised and standardised interface. ESA UNCLASSIFIED – For Official Use
APID Definition Tasks Deadlines PUS Services Service Time and Functional Characterisation Message Transfer Service Primitives Registration Table Asynchronous Message Transfer Service Protocol External Nodes Routing TM/TC Formats Sub-Net Service Timing Message Traffic with Local and Remote SW Entities Message Transfer Service Characterisation In the Avionics System Reference Architecture, the Software Bus entity is in charge to support the communication between applications and SW components. Although the Software Bus can be implemented with different mechanisms, it is clear that the SOIS MTS provides the needed infrastructure. ESA UNCLASSIFIED – For Official Use
Flight Software using SOIS Services ASW tasks schedule and I/O schedule are now related each others only due to the AOCS dependencies and the I/O operations are represented in terms of services (SOIS request & indication, time events). Components can be designed independently according to the functional and non-functional attributes of the interfaces. ASW Time Domain Payload 2 Manager OBCP Interpreter MTL Manager SOIS C&DA AOCS SOIS C&DA Payload 1 Manager Science TM Processing Scrubbing TC Manager HK TM Processing SOIS FPSS EEPROM Manager Monitoring Mode Manager Bus Time Domain SOIS Sub-Network SOIS Sub-Network SOIS Sub-Network SOIS Sub-Network SOIS Sub-Network SOIS Sub-Network AOCS Acquisitions Payload 1 Acquisitions Payload 2 Commanding AOCS Commanding Large Data Transfer Payload 2 Acquisitions Minor Frame 0 (125 msec) Minor Frame 1 (125 msec) Minor Frame 2 (125 msec) Minor Frame 3 (125 msec) … Minor Frame 6 (125 msec) Minor Frame 7 (125 msec) t Major Frame (1 sec) ESA UNCLASSIFIED – For Official Use
Improvements to Flight Software Some of the beneficial effects of the introduction of standard services: • the possibility to develop and analyse the software applications/components based on clear interfaces • the possibility to deploy some of the applications on a different processing core or partition without impacting the design of the avionics system • the possibility to exchange software/hardware components (e.g. sub-network services) with minimal impacts to the overall design. ESA UNCLASSIFIED – For Official Use
Status of SOIS publications and related developments ESA UNCLASSIFIED – For Official Use
Status of SOIS documentation SOIS Sub-Network Services: • published in 2009 and are currently used to drive new and upgraded ECSS protocols for CAN and Spacewire. SOIS Application Support Services: • Time Access Service published in 2011 • File and Packet Store Service and Message Transfer Service are currently under Agency review and will be published in 2011 • C&DA services are planned for 2011/2012 CCSDS SOIS work is now concentrated on: • the refinement of the communication architecture, particularly in terms of addressing and the provision of software APIs • The use of electronic data sheets to automate the process of interface definition and integration (C&DA and DES) ESA UNCLASSIFIED – For Official Use
Present and Future Developments Ongoing activities supporting standardisation: • A SOIS prototype is presently being prepared by SciSys (UK) in collaboration with ASTRIUM (F). This will result in an upgraded RASTA system at ESTEC and a published set of IPR free API’s. • A prototype of the CCSDS file transfer protocol (CFDP) mapped to an implementation of the SOIS file and packet store services is being prepared by Spacebel (B). This will also result in an upgraded RASTA system. • Packet Store Services have also implemented by Scisys (UK) in the frame of the MARC project. • An ECSS standard for CAN Bus is under preparation. This is being driven by the Exomars program and will result in an IP core compatible with SOIS sub-network services. • A SOIS/ECSS software component for Mil1553 Bus Controller has been developed by RUAG (S) and its counter part for Remote Terminal Units is being implemented. These software building blocks are produced in compliance with the flight software ECSS standards and validated on the RUAG’s flight hardware platforms (Tiger and Panther boards). • An alternative SOIS/ECSS sub-network services implementationfor Mil1553 Bus Controller have been developed by Terma (DK) and integrated in the Avionics System Test Bench at ESA. On 2011 the following additional activities are planned: • A TRP activity exploring the use of Electronic Data Sheets. • A TRP activity demonstrating Plug and Play techniques. • A TRP activity proving an end-to-end test-bed for the evaluation of file based communication and operations. ESA UNCLASSIFIED – For Official Use
Conclusions ESA UNCLASSIFIED – For Official Use
Execution platform PUS specific Abstract component services Component services Connector services Container services PUS and MTL services OBCP interpreter SOIS MTS Context Mgmt RTOS Reg Table PUS monitoring On-board time=SOIS TAS SOIS C&DA EDS BSP Libraries:mathematical, etc. SOIS Sub-Network Bus Profile Conclusions 1/2 • The key characteristics of the SOIS services architecture have been presented. • It has been shown that some of the essential features of the Execution Platform in the Avionics System Reference Architecture can be specified and implemented using the SOIS services. ESA UNCLASSIFIED – For Official Use
Conclusions 2/2 • Some services have been discussed in the context of the avionics and flight software design phase, here the flexibility given by these services demonstrates to be very beneficial as it allows to characterise the service interfaces without modifying the primitives. • A number of prototypes and flight software developments are ongoing under ESA contracts and in the near future will allow consolidate further the CCSDS standard specifications. ESA UNCLASSIFIED – For Official Use
SOIS and Software Reference Architecture F. TorelliDASIA 2011 - Malta17/05/2011 ESA UNCLASSIFIED – For Official Use