Download
1 / 12
120 likes | 130 Views
Explore the direct analogies between translational and rotational motion, from center of mass to moment of inertia, with examples and calculations. Understand how mass distribution affects motion in both linear and rotational contexts.

E N D
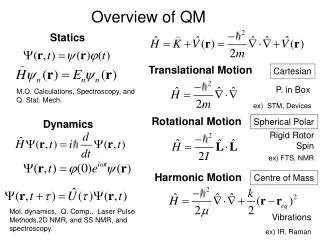
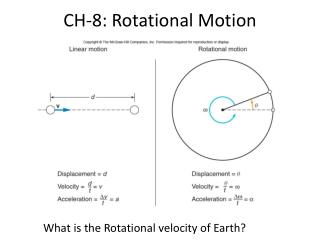
Here again are some of the direct analogies between translational and rotational motion: Quantity or PrincipleLinearRotation Position x Velocity v Acceleration a Inertia (resistance to mass (m) moment of acceleration) inertia (I) Moment of inertia (I) is different than the simple measure of mass (m). An object’s resistance to angular acceleration depends not only on how much mass it has but the distance of that mass from the axis of rotation. For example, to make a baseball bat easier to swing quickly, you “choke up”—place your hands (and thus the point of rotation) higher up the bat. OSU PH 212, Before Class 4
Center of Mass To consider how the distribution of mass in an object affects its motion, start with the center of mass (c.m.). The is the point in an object which it’s often accurate to model as the location of all its mass. The mass is not really all located there, but in many ways, it behaves as if it is. For example: • The c.m. is the “balance” point of the object, at which you can rest the entire object upon a fulcrum (like a seesaw or “teeter-totter”)—or hang it by a thread—and gravity will not rotate the object. Thus the c.m. is also known as the center of gravity (c.g.)—the point at which the entire FG acting on the object is effectively exerted. • The c.m. is also the point about which an unconstrained rotating object will rotate. Throw a hammer across the room…. What point does it rotate around? The same point it “balances” on! We will soon see how/why this must be true. OSU PH 212, Before Class 4
Calculating the Center of Mass For any uniform object, (symmetric, with uniform mass distribution), the center of mass is the geometric center of the object. (You know how to balance a uniform meter stick on a fulcrum: You place the 50-cm mark at the fulcrum, right?) In general (no matter whether the object is uniform), for any continuous distribution of mass, the c.m. is found by xcm = (1/M) xdm ycm = (1/M) ydm Essentially here, you’re multiplying each bit of mass by its distance from the edge of the object, summing all those contributions, then dividing by the total mass to find the “average” location of mass from the edge of the object. (And you do this for each axial direction.) That’s why the c.m. is the balance point. You’ll get practice doing some of these integrals in Lab 2-V. Here we’ll take simpler examples, where it’s not even necessary to integrate.… OSU PH 212, Before Class 4
Example: A straight, rigid, mass-less rod of length 1.00 m connects the point masses shown. Assigning x = 0 at the location of the 10-kg mass, where must you locate a fulcrum (support point) so that the object balances (i.e. does not tip) with gravity? In other words, where is the c.m. of this rod? 10.0 kg 30.0 kg A.x = 0.333 m Bx = 0.500 m C.x = 0.667 m D.x = 0.750 m E.None of the above. OSU PH 212, Before Class 4
For a continuous distribution of mass: xcm = (1/M) xdm But here the mass is not distributed in a continuous way; it’s just two discrete points. So the above becomes: xcm = (1/M) S(ximi)= [1/(10 + 30)]·[(0)(10) + (1)(30)] = 0.750 m 10.0 kg 30.0 kg A.x = 0.333 m Bx = 0.500 m C.x = 0.667 m D.x = 0.750 m E.None of the above. OSU PH 212, Before Class 4
The c.m. calculation works no matter where you select x = 0.Suppose you set x = 0 at the other end.…xcm = [1/(10 + 30)]·[(–1)(10) + (0)(30)] = –0.250 mOr suppose you set x = 0 at the midpoint.…xcm = [1/(10 + 30)]·[(–0.5)(10) + (0.5)(30)] = 0.250 m…All these calculations are identifying the same point along the rod —it’s the point 0.25 m from the right end. OSU PH 212, Before Class 4
Moment of Inertia (I) So how do we understand how an object’s resistance to angular acceleration? (Recall the baseball bat.) Why does that inertia depend on which axis you’re trying to rotate the object around? And is this “angular inertia” (called its moment of inertia) a c.m. calculation—the sum of each bit of mass times its distance from the rotation axis? For example, does an object double its resistance to angular acceleration when you double the distance of all its mass from the point you’re trying to rotate it around? No. The resistance quadruples. 10.0 kg 10.0 kg OSU PH 212, Before Class 4
As it turns out, it’s the square of the distance that matters. That is. For most objects (anything with a continuous mass distribution), I is an integral:* I = r2 dm For discrete “point” masses: I = S(ri2mi) *See page 300 in your textbook for the I values of common object shapes around common axes of rotation—as obtained via this integration. OSU PH 212, Before Class 4
Examples: Same 1.00-m massless rod, with the same point masses. What’s the moment of inertia, I, of this object for an axis of rotation (directed perpendicularly out of the page) located at… • the rod’s left end? • the rod’s right end? • the rod’s midpoint? • the rod’s center of mass (which we’ve already located, recall) 10.0 kg 30.0 kg OSU PH 212, Before Class 4
Examples: Same 1.00-m massless rod, with the same point masses. What’s the moment of inertia, I, of this object for an axis of rotation (directed perpendicularly out of the page) located at… … the rod’s left end? … the rod’s right end? … the rod’s midpoint? … the rod’s center of mass (which we’ve already located, recall) Ileft.end = (02)(10) + (12)(30)] = 30.0 kg·m2 Iright.end = (12)(10) + (02)(30)] = 10.0 kg·m2 Imidpoint = (0.52)(10) + (0.52)(30)] = 10.0 kg·m2Ic.m. = (0.752)(10) + (0.252)(30)] = 7.50 kg·m2 10.0 kg 30.0 kg OSU PH 212, Before Class 4
The Parallel Axis Theorem Instead of repeating a multi-part calculation, such as the previous slide, if you already know the I value around an axis through the object’s c.m.,there is a fairly simple way to get the value of I around any other parallel axis: Ip.axis = Ic.m.+ Md2 where M is object’s entire mass, and d is the straight-line distance between the c.m. axis and the desired axis. Thus, for our prior slide we could have done this: Ic.m. = (0.752)(10) + (0.252)(30)] = 7.50 kg·m2 Ileft.end = Ic.m.+ Md2 = 7.50 + 40(0.752) = 30.0 kg·m2 Iright.end = Ic.m.+ Md2 = 7.50 + 40(0.252) = 10.0 kg·m2 Imidpoint = Ic.m.+ Md2 = 7.50 + 40(0.252) = 10.0 kg·m2 OSU PH 212, Before Class 4
Notice what the Parallel Axis Theorem tells us—look at it again (and the above data supports this): Ip.axis = Ic.m.+ Md2 The moment of inertia about an axis through the c.m. (i.e. where d = 0) is the minimum I value for any rotation axis parallel to that axis. The “balancing” nature of the c.m. does come into play with I (but it’s in a different calculation than for the c.m. itself)! OSU PH 212, Before Class 4