Download
1 / 1
30 likes | 190 Views
P14251: Underwater Acoustic Communication. Motivation

E N D
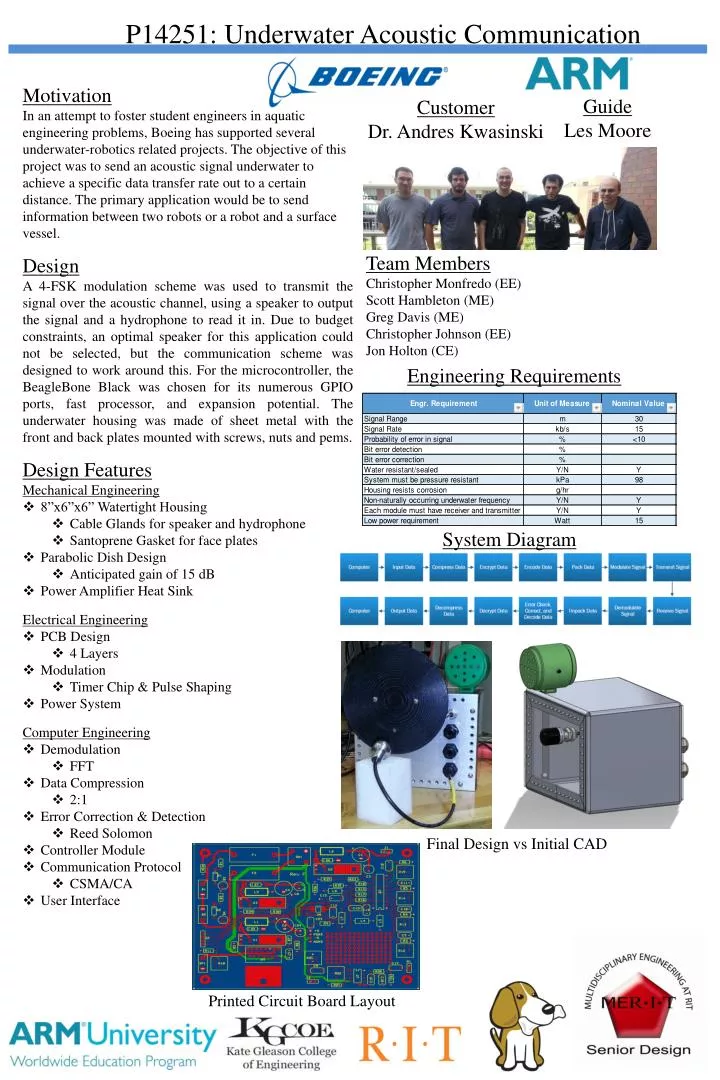
P14251: Underwater Acoustic Communication • Motivation • In an attempt to foster student engineers in aquatic engineering problems, Boeing has supported several underwater-robotics related projects. The objective of this project was to send an acoustic signal underwater to achieve a specific data transfer rate out to a certain distance. The primary application would be to send information between two robots or a robot and a surface vessel. • Design • A 4-FSK modulation scheme was used to transmit the signal over the acoustic channel, using a speaker to output the signal and a hydrophone to read it in. Due to budget constraints, an optimal speaker for this application could not be selected, but the communication scheme was designed to work around this. For the microcontroller, the BeagleBone Black was chosen for its numerous GPIO ports, fast processor, and expansion potential. The underwater housing was made of sheet metal with the front and back plates mounted with screws, nuts and pems. • Design Features • Mechanical Engineering • 8”x6”x6” Watertight Housing • Cable Glands for speaker and hydrophone • Santoprene Gasket for face plates • Parabolic Dish Design • Anticipated gain of 15 dB • Power Amplifier Heat Sink • Electrical Engineering • PCB Design • 4 Layers • Modulation • Timer Chip & Pulse Shaping • Power System • Computer Engineering • Demodulation • FFT • Data Compression • 2:1 • Error Correction & Detection • Reed Solomon • Controller Module • Communication Protocol • CSMA/CA • User Interface Guide Les Moore Customer Dr. Andres Kwasinski Team Members Christopher Monfredo (EE) Scott Hambleton (ME) Greg Davis (ME) Christopher Johnson (EE) Jon Holton (CE) Engineering Requirements System Diagram Final Design vs Initial CAD Printed Circuit Board Layout