Download
1 / 18
180 likes | 339 Views
A Low-Cost and Fail-Safe Inertial Navigation System for Airplanes. Robotics. 전자공학과. 201250797. 깡돌가. 2013.04.29. 1. Introduction . 2. Algorithm and method. 3. Experiment and result. 4. Conclusion . contents. introduction. Inertial navigation system everywhere. introduction.

E N D
A Low-Cost and Fail-Safe Inertial Navigation System for Airplanes Robotics 전자공학과 201250797 깡돌가 2013.04.29
1. Introduction 2. Algorithm and method 3. Experiment and result 4. Conclusion contents
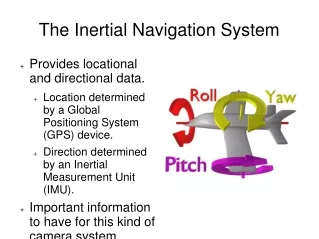
introduction Inertial navigation system everywhere
introduction Compass INS Accelerometer Gyroscope GPS Airspeed ASL board Triadis ISU
introduction The parameterization of orientation as well as nonlinearities are the major challenges inherent to the state reconstruction with six degrees of freedom. A minimal orientation representation e.g. with Tait-Bryan angles yields singularities, but angle/axis or the quaternion description cannot be directly used due to the additional unit length constraint. Concerning the second difficulty, namely nonlinearities, various alternatives to the EKF have been proposed and related research is ongoing. The EKF uses linearization around the estimated state for the propagation of covariances.
Method, algorithm During normal operation, when GPS is available, respective position updates are performed. At the same time, the wind is estimated, along with some of its statistical properties using airspeed measurements.
Method, algorithm In the case of (temporary) unavailability of position measurements, however, the system will switch to its back-up mode, where the airspeed vector measurement is used as filter update instead of the position update.
Method, algorithm It is well understood that MEMS inertial sensors suffer from bias drift and even scale change, mostly caused by temperature and mechanical stress variation. Therefore, the biases are typically included into the state vector. the bias of the gyroscope and accelerometer the atmospheric pressure reduced to sea level (QFF)
Method, algorithm The (noise free) INS equations are
Method, algorithm Linearizing the system around the states (x) allows describing the dynamics of the error states: Via straightforward derivation, the system matrix:
Method, algorithm For the sake of simplicity and limited computational power, the choice was made to discretize both the nonlinear system and the linearization with a zerothorder approximation:
Method, algorithm Before formulating the propagation equation for the state error covariance matrix P, some attention is paid to the process noise. We assume that zero-mean Gaussian White Noise dw is corrupting the system. In the linear case,
Experiment, result Experiment is 45-minute-long trajectory of a flight lasting several hours. For the evaluation of the proposed backup filter, the GPS positions were ignored for 30 minutes and replaced by airspeed backup updates. Glider pilot’s view
conclusion A robust state estimation framework for airplanes was presented that is based on Extended KalmanFiltering. The generality of the proposed framework makes it applicable to both unmanned and manned airplanes. Not only inertial sensors, magnetometers and GPS updates are used, but also both static and dynamic pressure measurements. The resulting filter is robust in the sense that it can cope with even long GPS outage.
conclusion 2020 GLOBAL TOP 100 Thank you!