Download
1 / 56
560 likes | 757 Views
Satellites and Inertial Navigation (Module 2). Since the 1960s, the US military has had on orbit a satellite or a constellation of satellites to aid the military in determining the position of ships, airplanes, or personnel.

E N D
Satellites and Inertial Navigation (Module 2) Since the 1960s, the US military has had on orbit a satellite or a constellation of satellites to aid the military in determining the position of ships, airplanes, or personnel. The US Navy has particular need of extremely accurate navigation not only to determine their location, but also to inertialy update high tech weaponry which most ships carry. For this reason the Transit, and Nova systems were built.
A more accurate system, the GPS or NAVSTAR has been placed in orbit. This constellation of satellites now allows users to determine where they are located within a few meters. • Infantry soldiers can determine their location extremely accurately making map reading far more reliable than previously. • Aircraft can fly anywhere in the world without using conventional navigation equipment and determine their location within a hundred meters. • Weapons can also be programmed to bring the possibility of precision weapon use to even poor countries, an ominous fact in a very useful peaceable system.
Projections and Coordinates Systems • Shape of the Earth: The shape of the Earth is best described as an imperfect sphere which bulges at the equator and flattens at the poles. It can be mathematically modeled by an Ellipse (in 2 dimensions) and an Ellipsoid (in 3 dimensions). Semi minor axis Semi major axis The Ellipsoid
Latitude and Longitude • Latitude and longitude are spherical coordinates on the surface of the earth. These lines serve as an imaginary grid that geographers use to pinpoint locations on earth. • The lines of latitude, called parallels, appear horizontal and run east and west around the globe. • The lines of longitude, which appear vertical and run between the North and South Poles, are called meridians. • Latitude is measured North or South of the Equator, The Equator is the parallel that divides the globe into two halves, the Northern and Southern Hemispheres. • Any point on the globe below the equator has a negative value for latitude, while points above the equator have positive latitude values. • Longitude is measured East or West of Greenwich, and can be expressed in different ways.
Latitude and Longitude Coordinates • In order to describe positions on a sphere we use the Latitude, Longitude coordinate system: • Latitude is the angular distance of a point away from the equator measured from the center of the globe 90 degrees North (0 to +90) or South (0 to -90). • Longitude is the angular distance of a point from the Principal Meridian measured from the center of the globe 180 degrees East (0 to +180) or West (0 to -180). The Principal Meridian is also referred to as the Prime Meridian or Greenwich Meridian.
Geodesy Basics Geodesy • The science that determines the earth’s size and shape, the inter-relationship of selected positions on (or near) its surface, the earth’s gravity field, and the changes in the above over time. Ellipsoid • The mathematical surface which approximates the earth’s shape and size and which is used as a reference frame for position computations. Datum • The mathematical model developed to fit the physical earth’s surface; defined by the ellipsoid and the constraints that relate the model to real world (i.e. monuments). Coordinate Values that relate a point to a mathematically defined surface.
GPS and Geodesy • Ellipsoid used by GPS is the World Geodetic System of 1984 (WGS 84). • WGS 84 model is for all practical purposes the same as the Geodetic Reference System of 1980 (GRS 80), the model used to define the North American Datum of 1983 (NAD 83) horizontal datum. • Elevations are determined referenced to Height Above Ellipsoid (HAE).
Receiver PositionPosition in XYZ is converted within the receiver to geodetic latitude, longitude and height above the ellipsoid.
Receiver Velocity and time • Velocity is computed from change in position over time, the SV Doppler frequencies, or both. • Time is computed in SV Time, GPS Time, and UTC. • SV Time is the time maintained by each satellite. Each SV contains four atomic clocks (two cesium and two rubidium). SV clocks are monitored by ground control stations and occasionally reset to maintain time to within one-ms of GPS time. Clock correction data bits reflect the offset of each SV from GPS time. • SV Time is set in the receiver from the GPS signals. Data bit subframes occur every six seconds and contain bits that resolve the Time of Week to within six seconds. The 50 Hz data bit stream is aligned with the C/A code transitions so that the arrival time of a data bit edge (on a 20 millisecond interval) resolves the pseudo-range to the nearest millisecond. Approximate range to the SV resolves the twenty ms ambiguity, and the C/A code measurement represents time to fractional milliseconds.
Satellites and Orbits • The velocity that a satellite needs to keep it flying close to the surface of the Earth is 7.9 kilometers per second, or the speed at which the Earth’s gravity and the centrifugal force of the satellite's rotation are in balance, is known as "the first astronautical velocity." • The path followed by the satellite is called its "orbit." If the first space velocity is exceeded, the satellite’s orbit becomes an ellipse, and at close to double this velocity, at 11.2 kilometers per second, a speed known as "the second astronautical velocity" or "escape velocity," the satellite escapes the influence of Earth's gravity and leaves its orbit.
GPS Satellite Orbits • GPS satellites occupy six orbital planes inclined 55o from the equatorial plane, with four or more satellites per plane. • As the GPS satellites are in nearly circular orbits, at an altitude of approximately 20200 km above the earth, this has a number of immediate effects which make the prediction of satellite location comparatively easy: • Their orbital period is approximately 11hrs 58mins, so that each satellite makes two revolutions in one sidereal day (the period taken for the earth to complete one rotation about its axis with respect to the stars). • At the end of a sidereal day (approximately 23hrs 56mins in length) the satellites are again over the same position on earth. • Reckoned in terms of a solar day (24 hrs in length), the satellites are in the same position in the sky about four (4) minutes earlier each day. • The orbit groundtrack approximately repeats each day, except that there is a small drift of the orbital plane to the west (-0.03 per day).
GPS Signal • Each GPS satellite carries a cesium and/or rubidium atomic clock to provide timing information for the signals transmitted by the satellites. • Each GPS satellite transmits two spread spectrum, L-band carrier signal: an L1 signal with carrier frequency 1575.42 MHz and an L2 signal with carrier frequency 1227.6 MHz. • The L1 signal from each satellite uses binary phase-shift keying (BPSK) modulated by two pseudorandom noise (PRN) code in phase quadrature, designed as the C/A-code and P-code. • The L2 signal from each satellite is BPSK modulated by only the P-code.
Satellite Attitude Control • A satellite must maintain a certain attitude while in orbit to allow precise pointing of an antenna toward the Earth, to allow the accurate orientation of observation instruments toward the object being observed, and to direct solar panels toward the Sun. But the satellite receives interference from such phenomena as the Earth’s gravitational and magnetic fields, and the solar wind. These phenomena tend to disturb the satellite’s attitude, so it is necessary to control attitude to keep it stable: • A passive stabilization system utilizes terrestrial gravity to maintain a stable satellite attitude. It is based on the principle that the Earth’s gravity field has a gradient. If the satellite is fitted with a long arm, the arm will point toward the Earth and thus give the satellite stability. • Spin stabilization is a means of stabilizing the attitude of a satellite without its antennas , or even the entire satellite, by spinning it. This is a very reliable system, but one disadvantage is that, because large solar collectors cannot be used, large amounts of electric power are not available.
Other techniques to stabilize satellites include bias momentum systems and zero momentum systemsIn bias momentum system a relatively large top or flywheel is made to spin, and this spin imparts attitude stability to the satellite. The zero momentum method is to adjust and stabilize satellite attitude according to its deviation by operating a relatively small wheel and gas jet by installing sensors and gyros that measure attitude errors in each of three axes.
The Altitude and Speed of Satellites The speeds of satellites vary according to their distance from the Earth’s surface. The duration of one orbit is known as the "orbital period," and for a circular orbit, the higher the altitude, the longer the orbital period becomes.
Design of a Satellite • Satellite design begins with a conceptual design, which is to make clear the purpose of the satellite and to examine the systems necessary to complete its mission. The preliminary design and basic design stages comes second. • The basic design stage prepares an engineering model, upon which many tests are carried out to confirm the adequacy of the basic design's electronics or composition. • Test results obtained from an engineering model reflect on a detailed design, and a prototype model built to the exact specifications of the final satellite is produced. • Satellite design is a major multidiscplinary project carried out by people such as system engineers, who must carry out their plans under the thorough management in cost, schedule and the performance.
Shapes of Satellites • Satellites are constructed in spherical shapes, cylindrical shapes, box shapes, and the multi-mission module system, where bus equipment and mission equipment are divided into upper and lower sections. Satellite shapes are decided according to the size and weight of carried equipments, type of attitude control system, and type of rocket used to launch the satellite. Generally, cylindrical or polygonal satellites use a spin stabilized system for attitude control, while box-shaped satellites use three-axis control systems.
Science of Navigation • Throughout history, science of navigation has played an important role for humanity. Individuals who could reliably travel to and return from distant locations were successful, both militarily and commercially. • Since 1940s, navigation systems, in particular inertrial navigation systems (INSs), have become important components in scietific and military applications.There are two types of INSs: • A mechanized platform approach that drives a set of actuators to maintain the alignment of the platform with the coordinate axes of the desired coordinate system independent of the motion of the vehicle relative to the navigation frame. • A strap-down approach that mounts the instrument platform directly to the vehicle chassis and transforms the inertial measurements to the navigation frame computationally. • In both approach, set of inertial instruments is mounted on a platform and the inertial measurements are integrated to determine position, velocity, and attitude.
Meaning of Navigation • To accurately determine position and velocity relative to known reference. • To plan and execute the maneuvers necessary to move between desired locations. • The first capability is important to achieve the second one accurately. • Usually we focus on this module on the first definition. • Among today’s trends in navigation are the integrated navigation systems, where the components (sensors) that are usually being integrated are the Inertial Navigation Systems (INS) and the GPS.
Guidance, Navigation, and Control • Guidance, navigation and control command the system to facilitate vehicle control and to provide the sensor and controller data needed to compute these commands. The process involves three steps: • Guidance • Equipment • Software
Guidance, Navigation, and Control (GNC) High-level Command Planning Position Velocity Attitude Navigation Guidance Sensor output Control Actuators Actuation Excitation Plant Sensors
The Navigation LoopThe sensed acceleration (expressed in the working frame) drives the integrating loop from which position and velocity are determined. The attitude is determined by integrating the gyro data over time (in the case of a strapdown system) or by reading the gimbal angles (in the case of a gimbaled platform system).
Inertial Navigation • Inertial navigation is based on techniques, which have been invented and developed after the Second World War. The first systems were built of mechanical gyros, which required very complicated technical and power consuming constructions being prone to failure. Later on “solid state” solutions have been realized by using only discrete integrated electro-mechanical or electro-optical sensors. These 'solid state' systems had no moving parts (therefore Strapdown Inertial Navigation System), but consisted of expensive laser-gyros and integrated sensor devices in MEMS technology (Micro Electro-Mechanical System). • INS are used in civil and military aviation, cruise missiles, submarines and space technology. According to these areas of operation, the entire system and all components have to be very precise and reliable. As a consequence, the costs for such a system are still very high and the size is not yet as small that it can be used for mobile roboting, wearable computing, automotive or consumer electronics.
Basic Concepts of Inertial Navigation • Inertia is the propensity of bodies to maintain constant translational and rotational velocity, unless disturbed by forces or torques, respectively (Newton’s first law of motion). • An inertial reference frame is a coordinate frame in which Newton’s laws of motion are valid. Inertial reference frames are neither rotating nor accelerating. • The input axis of an inertial sensor defines which vector component it measures. Multiaxis sensors measure more than one component.
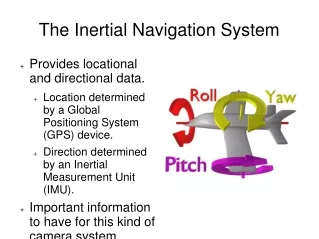
Inertial Navigation System • Inertial navigation uses gyroscopes and accelerometers to maintain an estimate of the position, velocity, attitude, and attitude rates of the vehicle in or on which the inertial navigation system (INS) is carried out, which could be a spacecraft, missile, aircraft, surface ship, submarine, or land vehicle. • An INS consists of the following: • Inertial measurement unit (IMU) or Inertial reference unit (IRU) containing a cluster of sensors (accelerometers, two or three orthogonal; and gyroscopes, usually three orthogonal). These sensors are rigidly mounted to a common base to maintain the same relative orientations. • Navigation computers (one or two) to calculate the gravitational acceleration (not measured by accelerometers) and doubly integrate the net acceleration to maintain an estimate of the position of the host vehicle. Clock.
Inertial Sensor Technologies • Inertial navigation depends on sensors for orientation. Inertial sensors measure rotation rate and acceleration, both of which are vector-valued variables. A classical system uses a three degree of freedom gyroscopic platform with accelerometers in each axis: • Gyroscopes: Sensors for measuring rotation (angular rate).They are used to give the orientation of an object (for example: angles of roll, pitch, and yaw of an airplane). • Accelerometers: Sensors for measuring acceleration. Cannot measure gravitational acceleration. Accelerometers sense a linear change in rate (acceleration) along a given axis. • MEMS inertial sensors:MEMS Inertial Sensors consist of miniature devices that combine electrical and mechanical inertial sensing components. Typical of such devices are accelerometers containing miniature proof masses and sensing electronics and gyroscopic devices.
Gyroscopes Sensors • Gyroscope (also called gyros) is a device that is used to define a fixed direction in space or to determine the change in angle or the angular rate of its carrying vehicle with respect to a reference frame. • Gyroscopes respond to vehicle angular rates, that is, rates of change of angles between vehicle axes and reference axes, from which these angles can be computed. • Gyroscopes are used for guidance, navigation, and stabilization, for example, to measure the angular deviation of a guided missile from its desired flight trajectory; to determine the heading of a vessel for steering; to determine the heading of an automobile as it turns through city streets; to indicate the heading and orientation of aircraft during and after a series of maneuvers; and to stabilize and point radar dishes and satellites. • Gyroscopes are at the core of inertial navigation units that guide mechanical systems such as aircraft, sea vessels, and cruise missiles. Although they have existed for decades, these sensing devices are rarely used in other industries because of their high cost. • Gyroscopes are recently developed on a chip (microgyroscopes).
Accelerometers • An accelerometer is a device for measuring acceleration. • Accelerometers are used along with gyroscopes in inertial guidance systems, as well as in many other scientific and engineering systems. One of the most common uses for MEMS accelerometers is in airbag deployment systems for modern automobiles. In this case the accelerometers are used to detect the rapid deceleration of the vehicle to determine when a collision has occurred and the severity of the collision.
Accelerometer Modeling At its most basic level, an accelerometer can be viewed as a classical second order mechanical system; that is a damped mass-spring system under an applied force. When an accelerometer experiences an acceleration, with a component parallel to its sensitive axis, the accelerometer's proof mass develops a corresponding inertial force. This force acts on and displaces the spring a distance x where k is the spring constant. The sensor’s output is related either to the spring's displacement x or to the spring's internal force, both of which are proportional to the applied acceleration. Frame Spring x Mass Damper
Combining the gyro-sensed orientation information with the summed accelerometer outputs yields the INU’s total acceleration in 3D space. • At each time-step of the system’s clock, the navigation computer time integrates this quantity once to get the body's velocity vector. The velocity vector is then time integrated, yielding the position vector. These steps are continuously iterated throughout the navigation process. • There are two primary types of inertial navigation systems: • Gimbaled • Strapdown • The differences in system type are based on the type of gyro being used.
Gimbaled Systems • In navigation systems, all gyroscopes were based on a rotating platform connected to an outer housing by low friction gimbals. • In a gimbaled system, a set of mutually orthogonal accelerometers are attached to the gimbaled gyro platform and hence are held in a fixed inertial orientation. In the event of an angular motion, the rotating platforms tend to maintain their original orientation per Newton’s First Law. • Pickoffs on the gimbals measure the movement of the outer body around the steady platform and the accelerometers measure the body's acceleration in the fixed inertial axes. • One of the limitations of a gimbaled system is its tendency to “lock up” in certain maneuvers. An example of gimbal lock is when airplane initially flying straight and level, then altering its pitch to a full vertical climb, and then going through a pure azimuthal turn through 90 degrees. The corresponding gimbal movements about the gyro platform results in a locked position yielding errors.
Strapdown Systems • As gimbaled inertial navigation systems evolved, they necessarily became increasingly based on intricate mechanical designs. In recent decades, technology has progressed more in the area of electronics than mechanics. • This is reflected in the evolution of the strapdown inertial navigation system. With less moving parts and mechanisms than gimbaled systems, strapdown inertial navigation systems have strongly benefited from the advance of computer technologies, being built upon electronics, optics, and solid state technology. • The majority of commercially available accelerometers and gyros take advantage of these modern technologies and are manufactured on micro-machined silicon.
Strapdown inertial navigation systems are rigidly fixed to the moving body. Therefore strapdown INUs move with the body, their gyros experiencing and measuring the same changes in angular rate as the body in motion. • The strapdown INU’s accelerometers measure changes in linear rate in terms of the body’s fixed axes. The body's fixed axes is a moving frame of reference as opposed to the constant inertial frame of reference. • The navigation computer uses the gyros’ angular information and the accelerometers’ linear information to calculate the body’s 3D motion with respect to an inertial frame of reference.
Gimbaled Versus Strapdown • In comparing gimbaled versus strapdown INSs, each displays it's own advantages and disadvantages. Perhaps a gimbaled INS's primary advantage is it's inherently lower error. • Since it is three orthogonal accelerometers are held in a fixed inertial orientation, only the vertically oriented one will be measuring gravity (and therefore experiencing gravity-related errors). • This is in contrast to the strapdown system, whose accelerometers all move and rotate about, each experiencing the acceleration of gravity (and the subsequent errors). • The strapdown system is entirely fixed to the body in motion.
Another gimbaled system advantage is the simplicity of its gyros: gimbaled system gyros’ primary function is to spin, to maintain a high moment of inertia, whereas strapdown gyros need to actually measure the subtended angles of motion. • The strapdown inertial navigation system's main advantage over the gimbaled system is the simplicity of its mechanical design. Where a gimbaled system requires elaborate and intricate mechanical structures for its gimbals, pickoffs, and low-friction platform connections
Inertial Navigation and Newton’s Law of Motion • Inertial Navigation is based on application of Newton’s law of motion. • In particular, Newton’s first law states that a body in motion tends to maintain its motion unless acted on by a force. • If a force sensing device is in motion, it maintain its motion untel acted by a force, which the device senses. • Since a measuring device (i.e, an accelerometer) is designed with a known mass, Newton’s second law can be applied to determine the acceleration as (a = F/m).
Physical and Mathematical Background • A body’s actual spatial behavior / movement can be described with six parameters: three translatory (x-, y-, z-acceleration) and three rotatory components (x-, y-, z-angular velocity). • To be able to define the movement of the body, three acceleration sensors and three gyros have to be put together on a platform in such a way, that they form an orthogonal system. • The distance laid back and the angle the body has actually rotated can be obtained by integration of the individual translatory and rotatory components. • Performing these calculations accurate and periodically enables the ideal system to trace its movement and to indicate its current position and heading.
The six parameters of freedom: A body’s spatial movement may be described with three translatory and rotary components. z az y ay y z x ax x
Accelerometer: A Second Order System • An accelerometer can be viewed as a classical second order mechanical system; that is a damped mass-spring system under an applied force. • When an accelerometer experiences an acceleration, with a component parallel to its sensitive axis, the accelerometer's proof mass develops a corresponding D’Alembert (inertial) force (F = ma). • This force acts on and displaces the spring a distance (x = F/k), where k is the spring constant. The sensor’s output is related either to the spring’s displacement or to the spring’s internal force, both of which are proportional to the applied acceleration. • When a force is applied to an accelerometer, we can look at the response of the second order mechanical system model by summing the forces acting on the proof mass.
GPS in Navigation • GPS can be regarded as a new navigation sensor. GPS provides range and range-rate measurements. • Primary role of GPS is to provide highly accurate position and velocity worldwide, based on range and range-rate measurements. • The acceleration vector is then determined from positions at different time epochs, by differentiation of these positions with respect to time. Byaccuracy we mean how close the average measurement is the actual true value (accuracy measures systematic error), distinguishing it thus from precision that describes how close the measurements are to one another (precision measures random error).
Integration with one or more external systems capable of sensing forces, for example, with an INS, has goal of achieving reliability in navigation, as the GPS signals may not be available at all times. • In that sense, the basic idea behind the integration of GPS and INS is to estimate the inertial sensor errors online using GPS. This means an in-flight calibration (update) or identification of the INS’s state and instrument errors in order to provide a precise inertial navigation solution – even during the loss of GPS signal (a few seconds to over a minute) – based on previous knowledge of INS errors.
Usually a filter code (a mathematical algorithm) that will optimally process such (by an integrated system) collected information is written, burned into a chip and integrated into the integration structure itself. • Of course, a filter implementation is not a necessity, but rather an option – an especially desirable one in military aircraft navigation – when losses of GPS signal due to sudden maneuvers are often. • Due to a filter implementation the final solution becomes consistently reliable. For example, short-term highly reliable three-axis attitude and heading (from, e.g. INS) may accompany long-term highly accurate position and velocity (from, e.g. DGPS and say, a Kalman filter). • The benefit of such (INS/GPS/filter) integration is then obvious. The INS error estimates may be used to improve INS/GPS navigation should GPS become unavailable.
Navigation Error Sources • Instrumentation Errors: The sensed variables may not equal the physical variables because of imperfections in the sensors (bias, scale factor, nonlinearity, random noise). • Computational Errors: Navigation equations are implemented by digital computers. Quantization, overflow and numeric (for example, integration) errors can occur. • Alignment Errors: Sensors and their platforms cannot be aligned perfectly with their assumed directions. • Environmental Errors: The environment cannot be modeled exactly and affects compensation of the measurements.
Sources of GPS Error and their Impact on positioning accuracy