Download
1 / 175
1.78k likes | 1.88k Views
Modelamento de conversores CC/CC. Gain. Phase. Dynamic Analizer. Resumo da apresentação. 1. Conceitos básicos sobre sistemas realimentados 2. Modelo do controle de um conversor cc/cc (exceto etapa de potência)

E N D
Modelamento de conversores CC/CC Gain Phase Dynamic Analizer
Resumo da apresentação 1. Conceitos básicos sobre sistemas realimentados 2. Modelo do controle de um conversor cc/cc (exceto etapa de potência) 3. Modelo da etapa de potência em modo continuo de condução e controle no modo tensão 4. Modelo da etapa de potência em modo descontínuo de condução e controle no modo tensão 5. Modelo da etapa de potência com controle no modo corrente 6. Projeto dos reguladores
Planta X - Saída Entrada Realimentação Sistema monovariável realimentado
xe(s) xo(s) xi(s) G(s) X - Saída Entrada (Planta) xfb(s) H(s) Realimentação Método de estudo:linearização+Transformada de Laplace
xo(s) xi(s) xe(s) G(s) X - Entrada Saída xfb(s) H(s) xo(s) xo(s) G(s) G(s) = = xe(s) xi(s) 1 + G(s)·H(s) Cálculo de funções de transferência Malha aberta Malha fechada
xo(s) xi(s) G(s) X - Entrada Saída xo(s) G(s) H(s) = xi(s) 1 + G(s)·H(s) Casos particulares Realimentação negativa 1 + G(s)·H(s) > 1 Ganho da malha xo(s)/xi(s) = 1/H(s) Realimentação positiva 1 + G(s)·H(s) < 1 Oscilante 1 + G(s)·H(s) = 0
Ad[dB] 80 40 vi 0 vo R1 -40 1 102 104 106 R2 Ad[º] 0 -60 -120 vo(j) Ad(j) -180 = -240 vi(j) 1 + Ad(j)·H 1 102 104 106 Ex.: Análise em malha fechada H = R2/(R2+ R1)
Ad[dB] 80 40 0 0,9091 mV 10 mV -40 9,091 V 1 102 104 106 vi Ad[º] vo R1 0 -60 R2 9,091 mV -120 -180 -240 1 102 104 106 Análise em malha fechada com R1 = 99,9 ky R2 = 100 (H = 10-3) a fi = 10 Hz e |Ad| = 10000 A 10 Hz todas as tensões estão praticamente em fase
Ad[dB] 80 40 0 -40 10,834 mV 10 mV 1 102 104 106 - 0,834 V Ad[º] vi 0 vo R1 -60 -120 R2 -180 - 0,834 mV -240 1 102 104 106 O que acontece em fi = 3,4 kHz? A 3,4 kHz o amp.operacional só tem um ganho de 38dB (77 vezes) e o defasamento é -180º.
a fi = 10 Hz afi = 3,4 kHz 0,9091 mV 10 mV 10,834 mV 10 mV 9,091 V - 0,834 V vi vi vo vo R1 R1 R2 R2 9,091 mV - 0,834 mV Comparação 0,9091 mV < 10 mV 1 + Ad(j)·H > 1 1 + 104·10-3 > 1 Realimentação negativa 10,834 mV > 10 mV 1 + Ad(j)·H < 1 1 + (-77)·10-3 <1 Realimentação positiva
vo(j) Ad(j) (oscilação) = vi(j) 1 + Ad(j)·H Resumo: Um circuito projetado para ter uma realimentação negativa, pode a partir de uma determinada freqüência ser realimentado positivamente. Isto se deve a inversão de fase que se produz a freqüências elevadas . Quais as condições para que o circuito entre em oscilação? Se 1 + Ad(j)·H = 0, então: Para que o sistema oscile é preciso que Ad(j)·H = - 1, o que equivale a: Ad(j)·H = 1 quando argAd(j)·H) = 180º (na realidade basta Ad(j)·H 1 quando argAd(j)·H) = 180º )
Com R1 = 99,9 k e R2 = 100 (H = 10-3) Ad(j)·H= (-77)·10-3< 1 Não oscila (estável) Com R1 = 900 e R2 = 100 (H = 10-1) Ad(j)·H= (-77)·10-1> 1 Oscila (instável) vo vo R1 R1 R2 R2 Ainda com Ad(j)·H a 3,4 kHz (que é quando argAd(j)·H) = 180º)
Ad·H[dB] Ad[dB] 80 80 Menor que 0 dB: sistema estável 40 40 0 0 -40 -40 multiplicamos por H (H=10-3) Ad·H[º] 0 0 Ad[º] -60 -60 -120 -120 -180 -180 -240 -240 1 102 104 106 1 102 104 106 Método sistemático (I)
Ad·H[dB] Ad[dB] Maior que 0 dB: sistema instável 80 80 40 40 0 0 -40 -40 multiplicamos por H (H=10-1) Ad·H[º] 0 0 Ad[º] -60 -60 -120 -120 -180 -180 -240 -240 1 102 104 106 1 102 104 106 Método sistemático (II)
Ad[dB] Ad[dB] Plotamos 1/H (1/H=101=20 dB) 80 80 40 40 Plotamos 1/H (1/H=103=60 dB) 0 0 -40 -40 Ad[º] Ad[º] Não chega a -180º: sistema estável 0 0 -60 -60 Ultrapassa -180º: sistema instável -120 -120 -180 -180 -240 -240 1 102 104 106 1 102 104 106 Outra maneira de analisar a estabilidade
G·H[dB] 80 40 0 MG -40 G·H[º] 0 -60 -120 MF -180 -240 1 102 104 106 Conceitos úteis em sistemas estáveis MG:margem de ganho MF: margem de fase Ambos parâmetros medem a distancia para as condições de instabilidade, avaliada como aumento possível de ganho e fase.
80 80 G·H[dB] G·H[dB] G(s) 60 X 60 - 40 40 H 20 20 0 0 -20 -20 -40 -40 -60 -60 0 0 G·H[º] G·H[º] -30 -30 -60 -60 -90 -90 MF = 90º -120 -120 -150 MF = 52º -150 -180 -180 1 1 102 104 106 102 104 106 Dois exemplos com diferentes MF e MG K=1000 K=100 G(s) = K/P(s) H = 10-1
xi(s) xo(s) MF = 90º (K=100) t xo(s) K/P(s) X xi(s) - xi(s) xo(s) 10-1 MF = 52º (K=1000) t Resposta temporal a um degrau de referência
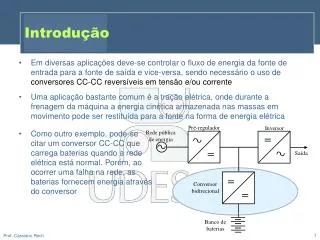
Tensão de saída Tensão de entrada Carga Etapa de potência Realimentação PWM Ref. Regulador Conversor cc/cc sem isolamento galvânico
Tensão de entrada Carga Tensão de saída Tensão de ref. Etapa de potência Regulador PWM - Realimentação Diagrama de blocos
Tensão de entrada Tensão de saída Carga Etapa de potência Realimentação PWM Ref. Reg.2 + opto + Reg.1 Conversor cc/cc com isolamento galvânico
Tensão de entrada Carga Tensão de saída Tensão de ref. Reg.1 + opto+ + Reg.2 Etapa de potência PWM - Realimentação Diagrama de blocos
Processo de modelamento de cada bloco 1º- Obtenção das equações da planta. 2º- Escolha do “ponto de operação”. 3º- Linearização em torno do “ponto de operação”. 4º- Cálculo de transformadas de Laplace.
y(x) 1º 2º y(x) y = y(x) yA xA x x tg= [y(x)/x]A ^ ^ y(x) ^ ^ ^ y(x) = [y(x)/x]A·x 3º ^ x Etapas 1 a 3 do processo de modelamento
+ R1 + vO R2 vr0 R2 vO vr0= - - R1 + R2 (R1·R2)/ (R1 + R2) R2 + ^ ^ + vO vr0= R2 vr R1 + R2 vO vr0= R1 + R2 - - Circuito equivalente Blocos de um conversor cc/cc “muito fáceis de modelar” (I) Equação (a vazio): Rede de realimentação Linearização:
VP PWM d vd VPV + + VV vd vgs - vgs - tC T vd - VV d = VPV 1 ^ ^ vd d = VPV Blocos de um conversor cc/cc “muito fáceis de modelar” (II) Equação: tC = d·T Linearização: d/vd = 1/VPV
Z2 Z1 Z1 + Z2 Z2 + vREF - vd= vr Z1 Z1 + vr vREF vd - - Regulador Z2 ^ ^ vd= - vr Z1 Z2 1 ^ ^ · vd= - vr 1 + (Z1 + Z2)/(Ad·Z1) Z1 Blocos de un conversor cc/cc “muito fáceis de modelar” (III) Equação: Linearização: (se o ampl. oper. Não for ideal)
Z2 Z1 (R1·R2)/ (R1 + R2) R2 vREF + vO = vr0 R1 + R2 vd - Rede de realimentação Regulador Interação “rede de realim.” / “regulador” (I)
Z’1 Z2 R1·R2 Z1 (R1 + R2) R2 vO = vr0 + vREF R1 + R2 vd Regulador Rede de realimentação - Z2 R2 ^ ^ vO vd= - · R1 + R2 Z’1 Interação “rede de realim.” / “regulador” (II)
+ vO + - - ^ ^ Etapa de potência ^ ^ Z2 vd vO 1 vREF=0 d VPV Z’1 ? - R2 ^ vr0 R1 + R2 Diagrama de blocos em isolamento galvânico (I) Z2 R1 Z1 d PWM vREF R2 vgs Rede de realimentação Regulador
^ e ^ r ^ ^ Etapa de potência ^ vO ^ Z2 vd 1 vREF=0 d ? VPV Z’1 - R2 ^ vr0 R1 + R2 ^ e ^ r ^ Etapa de potencia ^ ^ vO ^ ^ vr0 vd 1 -Z2 vO d R2 ? VPV R1 + R2 Z’1
^ e ^ r ^ Etapa de potência ^ ^ vO ^ ^ vr0 vd 1 -Z2 vO d R2 ? VPV R1 + R2 Z’1 - Z2 ·R2 ^ ^ vO d = Vpv·Z’1·(R1+R2) Conclusão do caso “sem isolamento galvânico” Z’1 = Z1 + (R1·R2)/(R1+R2)
iLED + Z1 Z2 vx + vr R5 vREF - - Caso A: vx = vO Caso B: vx = cte. ^ ^ ^ ^ ^ iLED = (vO + vr·Z2/Z1) / R’5 iLED = vr·Z2 / (Z1·R’5) Bloco de “reguladores com optoacoplador” (I) Equações: R’5 = R5 + RLED iLED = (vx + vr·Z2/Z1 - vREF·(1+ Z2/Z1 )) / R’5 Linearização:
iLED Z4 Z3 iFT + + vd v’REF vZ6 C6 R6 - { - Z6 ^ ^ ^ ^ iFT = k·iLED vd=- iFT·(Z6·Z4/(Z3+ Z6) Bloco de “reguladores com optoacoplador” (II) Equações: C’6 = C6 + CPFT iFT = k·iLED vd= -iFT·(Z6·Z4/(Z3+ Z6) + v’REF·(1+ Z4/(Z3+ Z6) Linearização:
Z4 + vx k Z3 Z1 Z2 + + R5 vd vr v’REF vREF C6 R6 - R’5 { - Z6 Caso A: vx = vO ^ ^ ^ vd= -(vO + vr·Z2/Z1)·k·Z6·Z4 / (R’5·(Z3+Z6)) Caso B: vx = cte. ^ ^ vd= - vr·k·Z2·Z6·Z4 / (R’5·Z1·(Z3+Z6)) Bloco de “reguladores com optoacoplador” (III)
^ e Z’1 = Z1 + (R1·R2)/(R1+R2) ^ ^ r vd Etapa de potência ^ ^ -k·Z2·Z6·Z4 vr0 + 1 R2 d ? VPV R’5·Z’1·(Z3+Z6) R1 + R2 ^ + vO ^ vO -k·Z6·Z4 R’5·(Z3+Z6) ^ ^ ^ vd= -(vO + vr0·Z2/Z’1)·k·Z6·Z4 / (R’5·(Z3+Z6)) Diagrama de blocos no caso A (vx = vO)
^ e ^ ^ r vd ^ ^ -k·Z2·Z6·Z4 vr0 1 R2 d VPV R’5·Z’1·(Z3+Z6) R1 + R2 ^ vO ^ vO -k·Z6·Z4 R’5·(Z3+Z6) R2·Z2 1+ (R1+R2)·Z’1 ^ ^ vO d = -k·Z6·Z4 Vpv·R’5·(Z3+Z6) Conclusão do caso A (vx = vO) Etapa de potência + ? +
^ e ^ r ^ ^ ^ Etapa de potência vO vr0 ^ vd 1 -k·Z2·Z6·Z4 R2 d VPV ? R1 + R2 R’5·Z’1·(Z3+Z6) ^ vO ^ ^ vd= - vr0·k·Z2·Z6·Z4 / (R’5·Z’1·(Z3+Z6)) Diagrama de blocos no caso B (vx = cte.) Z’1 = Z1 + (R1·R2)/(R1+R2)
^ e ^ r ^ ^ ^ Etapa de potência vO vr0 ^ vd 1 -k·Z2·Z6·Z4 R2 d VPV ? R1 + R2 R’5·Z’1·(Z3+Z6) ^ vO -k·Z6·Z4·Z2 ·R2 ^ ^ vO d = Vpv·R’5·(Z3+Z6)·Z’1·(R1+R2) Conclusão do caso B (vx = cte.)
(R1+R2)·Z’1 -k·Z6·Z4·Z2 ·R2·(1 + ) R2·Z2 ^ ^ d = vO Vpv·R’5·(Z3+Z6)·Z’1·(R1+R2) -k·Z6·Z4·Z2 ·R2 ^ ^ vO d = Vpv·R’5·(Z3+Z6)·Z’1·(R1+R2) Comparação entre ambos casos caso A (vx = vO) caso B (vx = cte.) O caso A é igual o B com a adição do termo: 1 + (R1+R2)·Z’1/ R2·Z2
Quando 1 >> (R1+R2)·Z’1/ R2·Z2 (baixa freqüência) • Caso A = Caso B • Quando 1 << (R1+R2)·Z’1/ R2·Z2 (alta freqüência) -k·Z6·Z4 ^ ^ vO d = Vpv·R’5·(Z3+Z6) Z4 Z3 Z6 Problema presente no Caso A (vx = vO) Ou Z4 ou Z6 devem ser dimensionandos para fornecer um polo em freqüências tais que: 1 (R1+R2)·Z’1/ R2·Z2
Modelamento da etapa de potência • Modelamento não linear e não medianizado: • simulação muito precisa e lenta (pequenos e grandes sinais) • Difícil projeto do regulador • Modelamento não linear e medianizado: • simulação precisa e rápida (pequenos e grandes sinais) • Difícil projeto do regulador • Modelamento linear e medianizado: • simulação menos precisa e rápida • só pequenos sinais • Fácil projeto do regulador
Em todos métodos de modelamento: • O primeiro passo sempre é identificar os subcircuitos lineares que contínuamente estão variando no tempo. Há dois casos: • Modo de condução continuo (mcc): dois subcircuitos • Modo de condução descontínuo (mcd): três subcircuitos
iS IO comando e t vO iL iD IO t iS iL t + + iL - - iD e vO vO t Durante d·T Durante (1-d)·T d·T T Exemplo I: Conversor buck em mcc iL
iL iD IO vO iS e iL iL + e - e vO Durante d·T Durante (1-d)·T Exemplo II: Conversor boost em mcc comando t iL t iS t iD iD t d·T T
comando t IO iS iD iL iL e vO t iS t iL iL iD - iD vO t e + d·T T Durante (1-d)·T Durante d·T Exemplo III: Conversor buck-boost em mcc
comando t iL t iD iD vO e t d·T d’·T T vO vO e e vO e (d’·T) (1-d-d’)·T (d·T) Exemplo IV: Convertidor buck-boost em mcd • Existem 3 estados distintos: • Condução do transistor d·T • Condução do diodo d’·T • Nenhum deles conduz (1-d-d’)·T
iL iL + + + + vO vO vO vO iL iL e e - - - - Durante t1 Durante t3 Durante t2 Durante t4 Modelamento não linear e não medianizado • Possibilidades: • Simular em um programa tipo PSPICE o circuito real. • Resolver intervalo a intervalo as equações dos subcircuitos lineares. Exemplo: Conversor buck em mcc Seguindo esta técnica podemos simular o comportamento do circuito de potência no domínio do tempo. A informação será exata, mas difícilmente aplicavel ao projeto do regulador.
d t iL medianizado t vO valor medianizado t Modelamento não linear e medianizado Idéia fundamental: “sacrificar” a informação do que ocorre a nivel de cada ciclo de comutação para conseguir um tempo de simulação muito menor. Em particular, as variavéis elétricas que variam pouco em cada ciclo de comutação (variáveis de estado) são sustituídas por seus valores médios. As variáveis elétricas nos semicondutores também são (de alguma forma) medianizadas.
Métodos modelamento não linear e medianizado Método da medianização de circuitos: Se medianizam os subcircuitos lineares, que previamente se reduzem a uma estrutura única baseada em transformadores. Método da medianização de variáveis de estado: Se medianizam as equações de estado dos subcircuitos lineares. Método do interruptor PWM (PWM switch): O transistor é sustituído por uma fonte dependente de corrente e o diodo por uma fonte dependente de tensão.