Download
1 / 12
120 likes | 223 Views
A Minimum Cost Path Search Algorithm Through Tile Obstacles. Zhaoyun Xing and Russell Kao Sun Microsystems Laboratories. Search Through Tile Obstacles. A classical problem Find a path for two points through some obstacle tiles in a rectangular area Many applications

E N D
A Minimum Cost Path Search Algorithm Through Tile Obstacles Zhaoyun Xing and Russell Kao Sun Microsystems Laboratories
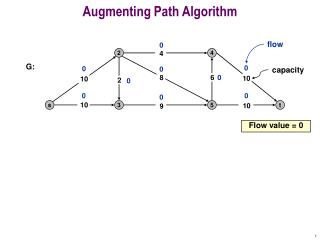
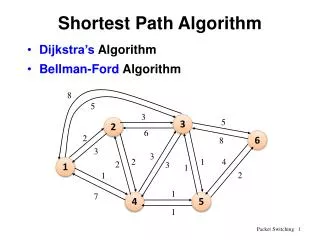
Search Through Tile Obstacles • A classical problem • Find a path for two points through some obstacle tiles in a rectangular area • Many applications • Robotics arm path searching • VLSI routing • Previous approaches • Line probe based algorithms • Graph based algorithms T S ISPD 2001
All try to build a graph that contains the shortest path Maze uniform graph Non-uniform graph Connection graph Connection graph Wu et al, 1987 Extend S/T and obstacle boundary lines. Until hit an obstacle or a boundary edge Graph size is is obstacle number Graph Based Search Algorithm T S ISPD 2001
Extend only in one direction Unoccupied space is fractured into maximal tiles Tile Graph • Nodes: space tiles and S/T • Edges: adjacency T 1 1 3 T 2 3 2 4 4 6 6 5 5 7 7 9 8 9 8 10 10 S 11 12 12 11 13 13 S ISPD 2001
Motivations • Tile graph is small • Size is linear in the number of obstacle tiles • Previous tile expansion approaches • Not accurate edge cost • The search is guided by the estimated cost • Our approach • Guide the search using an accurate cost propagation ISPD 2001
Outline of the Rest of the Talk • Cost propagation through a tile • Cost definition • Propagation formulation • Linear Minimum Convolution (LMC) • The minimum cost path search algorithm • Conclusion and future works ISPD 2001
Recti-linear cost inside a tile Cost between two points and Focus Cost propagation from [a, b] to [c, d] Example Min cost is 0 on [a, b] Min cost on [c, d] is It is a piecewise linear function c(x) x c d b Cost Propagation through A Tile G F x d c h s b a E ISPD 2001
Assumptions The minimum cost function on interval [a, b] is a piecewise linear function . The min cost function on [c, d] Is still a piecewise linear function Bottom line How to compute efficiently? Approach Use a notation, we call it, Linear Minimum Convolution (LMC) Cost Propagation through A Tile G F x d c h s b a E ISPD 2001
Definition and a piecewise linear function defined on [a, b], their LMC f(x) is a line segment with slope k Linear Minimum Convolution (LMC) a b ISPD 2001
a b LMC • Observations • Easy to compute LMC of each line segment • Still need to compute the minimum function of line segments • Brute force approach is • Compare f(x) with 2n legs (beam lines) • Our clipping algorithm is linear • See Proceedings for detail ISPD 2001
Search Algorithm • Get tile list first • Use A* search • Get a tile list containing the shortest path • Retrieve the point path • Build a connection grid graph based on tile list • This graph is small ISPD 2001
Conclusion and Future Work • A new minimum cost path search algorithm • Tile graph based • Accurate cost propagation from tile to tile • Linear Minimum Convolution • Future works • Explore the applicability of this algorithm to the VLSI routing • Experiments • Thank you! ISPD 2001