Download
1 / 15
150 likes | 366 Views
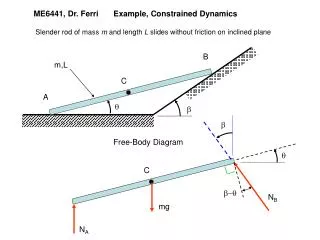
ME6441, Dr. Ferri. Example, Constrained Dynamics. Slender rod of mass m and length L slides without friction on inclined plane. B. m,L. C. A. q. b. b. Free-Body Diagram. q. C. b-q. N B. mg. N A. Force/Moment Balance. S F x. +. S F y. +. S M c. +. Kinematics. Combine.

E N D
ME6441, Dr. Ferri Example, Constrained Dynamics Slender rod of mass m and length L slides without friction on inclined plane B m,L C A q b b Free-Body Diagram q C b-q NB mg NA
Force/Moment Balance SFx + SFy + SMc + Kinematics
Combine Differentiate or and
Potential energy Virtual Work Calculate necessary derivatives
Lagrange’s Equation: where
B Alternate Formulation C NB q A yc NA b O xc
Virtual displacements Virtual work
Lagrange’s equations j=1,2,3 xc yc q
B Alternate Formulation C q yc A b O xc In this formulation, we assume that the rod is free to move in a 2-D plane. Other than (conservative) gravity forces, no other forces are modeled.
Constraint at A C A O
Constraint at B B C O configuration constraint
Constraint summary Constraint at A Thus, Constraint at B Thus,
Lagrange’s Equations j=1,2,3 xc yc q Comparing with Newton-Euler equations