Download
1 / 18
180 likes | 253 Views
This project aims to create a low-cost, internet-controlled nanomanipulator to enhance participation and collaboration in nanoscale science. Leveraging Phase I equipment, the team will design a versatile and transportable system. By repurposing existing tools and incorporating innovative features, the manipulator will democratize access to high-precision nanotechnology. The project involves interdisciplinary tasks such as motor control, remote implementation, hydraulic redesign, manufacturability analysis, and statistical performance evaluation. Challenges include budget constraints impacting system specifications and the need for a skilled and diverse project team to achieve optimal outcomes.

E N D
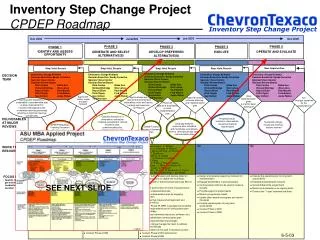
Phase II: Nanomanipulator Design Problem Statement: Broaden participation and collaboration in nanoscale science by creating low cost, remotely accessible instrumentation.
Situation Update • What is a nanomanipulator? • Ultra high precision position instrument • Why do we want to make one? • Broaden participation and collaboration in nanoscale science • How will this be accomplished • Developing a commercially competitive manipulator that is low cost and controllable over the internet • What does it mean to be “Phase II” • Given entire body of Phase I Equipment to use/repurpose • More is expected in terms of progress as a result
Constraints • Manipulator must have potential to be manufacturable for less then $1000 • Team must build off phase one equipment or justify to primary customer a redesign • System must be transportable • Training must be complete before using any high cost instrumentation, including the provided microscope or any of the lab’s manipulators
Possible Solution • Using the Current Phase 1 equipment and adding functionality • For this solution the team would elect to reuse, repurpose or redesign most the phase 1 equipment provided to them. Phase 1 provided all the equipment necessary for a lead screw driven, motor controlled hydraulic manipulator. Key aspects of this solution would include • Lead screw, Hydraulic pump, 3 axis manipulator • Motor driver and Computer control scheme • Remote control scheme • Visual feed back scheme
Staffing • CE1/EE1 responsible for • Computer control of motors and sensors • Developing circuitry to control motors • Selecting sensors and integrating sensors to improve performance • Integrating microscope camera feed back • SE1/CE2 responsible for • Remote control implementation • Setting up required support back end for web implementation • Selection of web cam and other components necessary • Integrating microscope camera feed back • ME1 responsible for • Redesign efforts on current system • Lead on hydraulic design efforts • Improving backlash of system • Improving assembly/disassembly times • Ensuring that changes to system do not adversely effect performance • Machining of new components • IE1/ME2 responsible for • Manufacturability analysis and work • Responsible for machining of components • Responsible for ensuring those components are • Lead on mechanical integration of various components • Statistical performance analysis (true resolution estimations)
Project Reflection • Project requires significantly more staffing if team chooses to no use Phase I equipment and is never the less expected to meet all goals • Some specifications (backlash, resolution) might be limited significantly by budgetary constraints • Difficult project and optimal staff would relevant co-op experience • Not the case for every engineer