Download
1 / 1
10 likes | 151 Views
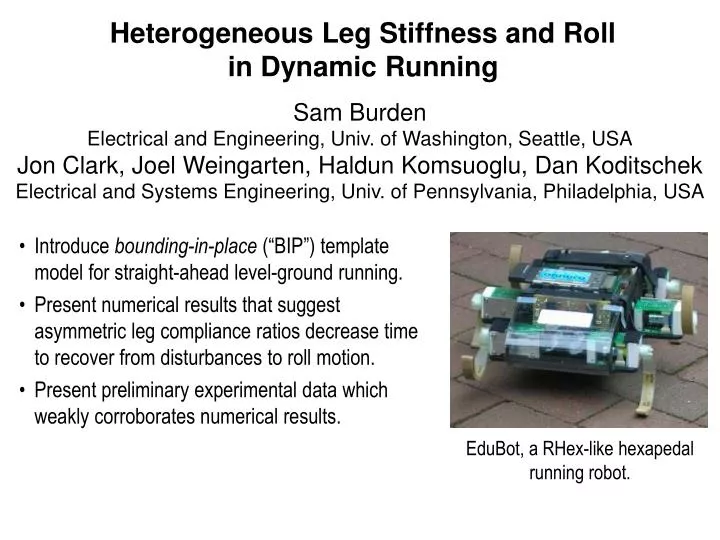
Heterogeneous Leg Stiffness and Roll in Dynamic Running. Sam Burden Electrical and Engineering, Univ. of Washington, Seattle, USA Jon Clark, Joel Weingarten, Haldun Komsuoglu, Dan Koditschek Electrical and Systems Engineering, Univ. of Pennsylvania, Philadelphia, USA.

E N D
Heterogeneous Leg Stiffness and Roll in Dynamic Running Sam Burden Electrical and Engineering, Univ. of Washington, Seattle, USAJon Clark, Joel Weingarten, Haldun Komsuoglu, Dan KoditschekElectrical and Systems Engineering, Univ. of Pennsylvania, Philadelphia, USA • Introduce bounding-in-place (“BIP”) template model for straight-ahead level-ground running. • Present numerical results that suggest asymmetric leg compliance ratios decrease time to recover from disturbances to roll motion. • Present preliminary experimental data which weakly corroborates numerical results. EduBot, a RHex-like hexapedal running robot.