Download
1 / 5
60 likes | 248 Views
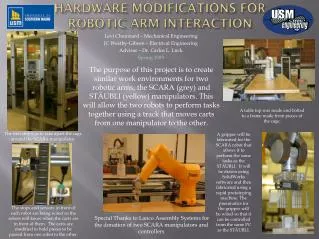
P11213 Robotic Arm Analysis. Typical Servo Current: 830 mA no load @ 6V 3000+ mA max holding @ 6V. 3 Motor Case : -Based on mechanical calculations for arm -Assuming 932 oz/in holding torque for motor 1 -Assuming 434 oz/in holding torque for motor 2

E N D
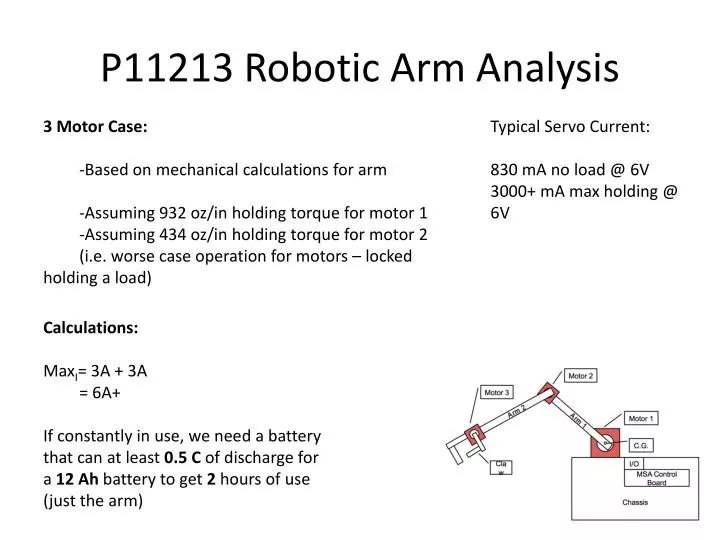
P11213 Robotic Arm Analysis Typical Servo Current: 830 mA no load @ 6V 3000+ mA max holding @ 6V 3 Motor Case: -Based on mechanical calculations for arm -Assuming 932 oz/in holding torque for motor 1 -Assuming 434 oz/in holding torque for motor 2 (i.e. worse case operation for motors – locked holding a load) Calculations: MaxI= 3A + 3A = 6A+ If constantly in use, we need a battery that can at least 0.5 C of discharge for a 12 Ah battery to get 2 hours of use (just the arm)
P11213 4-Bar Analysis Typical Servo Current: 285mA no load @ 6V 3000 mA max holding @ 6V 1Motor Case: -Based on mechanical calculations -Using a servo with 200 oz in stall torque -Assuming max torque from setup 100 oz in Calculations: MaxI=~ 1000 mA If constantly in use, we need a battery that can at least handle .25 C of discharge for a4Ah battery to get4 hours of use (just the MSA)
P11213 Pros & Cons • 3 Motor Case: • Pros: • Servos have built in encoders so positioning the motors is simple compared to others • No motor drivers needed. • Cons: • Need some type of regulation (step down from batt voltage) to run servos • Expensive and complicated • Draws a significant amount of current
P11213 IC to IC Communication Analysis • UART Case: • Highest speed for ATMega with External Xtal • @ 16 MHz : 31 kB/s • (~15.5 kB/s for internal OSC @ 8 MHz) • 1 byte (8 bits) per packet • Data communication packet structure:\ • Max Message Latency: • Time through USART: 7B / 31kBps = 225us • Time through USART: 7B / 15.5kBps = 450us UART UART
P11213 IC to IC Communication Analysis • UART Case: • Same instruction set used through the RFfor the controls board: • Forward Backward Left Right M1 + M1 - M2 + M2 - M3 + M3 - M4 + M4 - M5 • + M5 - M6 + M6 - M7 + M7 - M8 + M8 – • 5 bit: instruction 0-31 • 4 bit: speed 0-15 • X bit: redundancy • 5 instructions at once • (5+4+9)*3= 54 bits/instruction set UART UART