Download
1 / 8
80 likes | 216 Views
Compare current to map. Deliver Information to User. Receive Map Info. On Map?. Region Map. Record location history. Calculate Velocity. ID current location (RFID). Calculate ETA. ETA. Nearest Tag ID(s). Calculate path. Navigation Loop. Calculate next movement instruction.

E N D
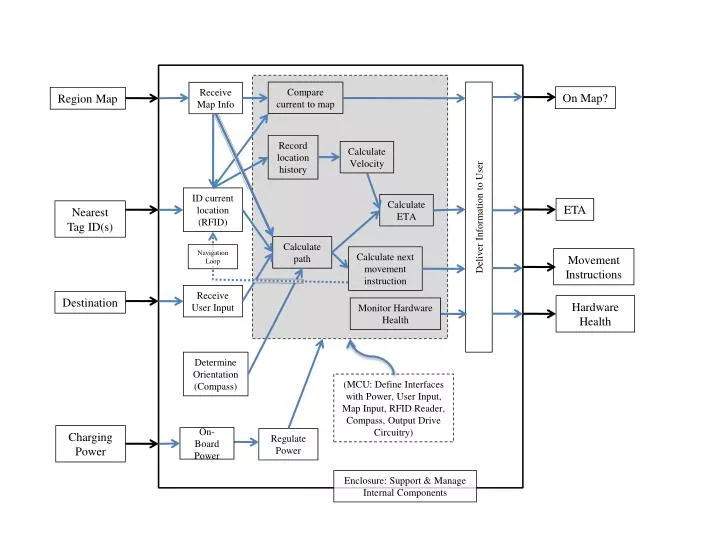
Compare current to map Deliver Information to User Receive Map Info On Map? Region Map Record location history Calculate Velocity ID current location (RFID) Calculate ETA ETA Nearest Tag ID(s) Calculate path Navigation Loop Calculate next movement instruction Movement Instructions Receive User Input Destination Hardware Health Monitor Hardware Health Determine Orientation (Compass) (MCU: Define Interfaces with Power, User Input, Map Input, RFID Reader, Compass, Output Drive Circuitry) Charging Power On-Board Power Regulate Power Enclosure: Support & Manage Internal Components
Deliver Information to User Compare current to map Receive Map Info On Map? Region Map Record location history Calculate Velocity ID current location (RFID) Calculate ETA ETA Nearest Tag ID(s) Calculate path Navigation Loop Calculate next movement instruction Movement Instructions Receive User Input Destination Hardware Health Monitor Hardware Health Determine Orientation (Compass) (MCU: Define Interfaces with Power, User Input, Map Input, RFID Reader, Compass, Output Drive Circuitry) Charging Power On-Board Power Regulate Power Enclosure: Support & Manage Internal Components
Deliver Information to User Compare current to map Receive Map Info On Map? Region Map Record location history Calculate Velocity ID current location (RFID) Calculate ETA ETA Nearest Tag ID(s) Calculate path Navigation Loop Calculate next movement instruction Movement Instructions Receive User Input Destination Hardware Health Monitor Hardware Health Determine Orientation (Compass) (MCU: Define Interfaces with Power, User Input, Map Input, RFID Reader, Compass, Output Drive Circuitry) Charging Power On-Board Power Regulate Power Enclosure: Support & Manage Internal Components
Deliver Information to User Compare current to map Receive Map Info On Map? Region Map Record location history Calculate Velocity ID current location (RFID) Calculate ETA ETA Nearest Tag ID(s) Calculate path Navigation Loop Calculate next movement instruction Movement Instructions Receive User Input Destination Hardware Health Monitor Hardware Health Determine Orientation (Compass) (MCU: Define Interfaces with Power, User Input, Map Input, RFID Reader, Compass, Output Drive Circuitry) Charging Power On-Board Power Regulate Power Enclosure: Support & Manage Internal Components
Categorize your Core Functions • Which functions will be constrained? • e.g., tasked to an existing project, or required to use a particular technology by the customer • Which functions will be limited to a small set of solutions? • e.g., not intended to be the focus of creative, new ideas • Which functions will be open to new ideas? • e.g., identified by you or your customer as the intended focus of the creative process
6-3-5 Method • Teams sit in circles • Each team member writes down 3 ideas on a piece of paper (3 minutes) • Pass paper to the left • For 1 minute, make comments, additions, sketches on the paper in front of you • Repeat until new idea generation stabilizes • In class today, use this for functions that have a limited number of solutions
C-Sketch Method • Teams sit in circles • Each team member sketches one design solution • Pass paper to the left • For 1 minute, make comments, additions, sketches on the paper in front of you • Repeat until new idea generation stabilizes • In class today, use this for functions that are targeted for developing new, innovative solutions
Next Steps • Continue idea generation outside of class in parallel with refining interfaces and specifications!! • Consider where these ideas reside on the spectrum of difficulty for an MSD team • Plug & play? • Brand new technology • What skill sets will be required to implement these ideas? • How should you plan to implement projects to keep each step reasonable, but still make forward progress?

![Risk MAP and Discovery FEMA Region [#], [WATERSHED NAME] Watershed](https://cdn1.slideserve.com/2868558/risk-map-and-discovery-fema-region-watershed-name-watershed-dt.jpg)