Download
1 / 1
10 likes | 146 Views
E. A. C. B. A. t1 E. t2 E. t1 A. t1 B. t2 B. t1 C. t1 D. t2 D. t1 C. t2 A. Effects Beh 1…k {1/0}. Test task specific preconditions. Effects Beh i {1/0}. Task specific preconditions. if met. if met. Test world preconditions. Test world preconditions. Abstract behavior.

E N D
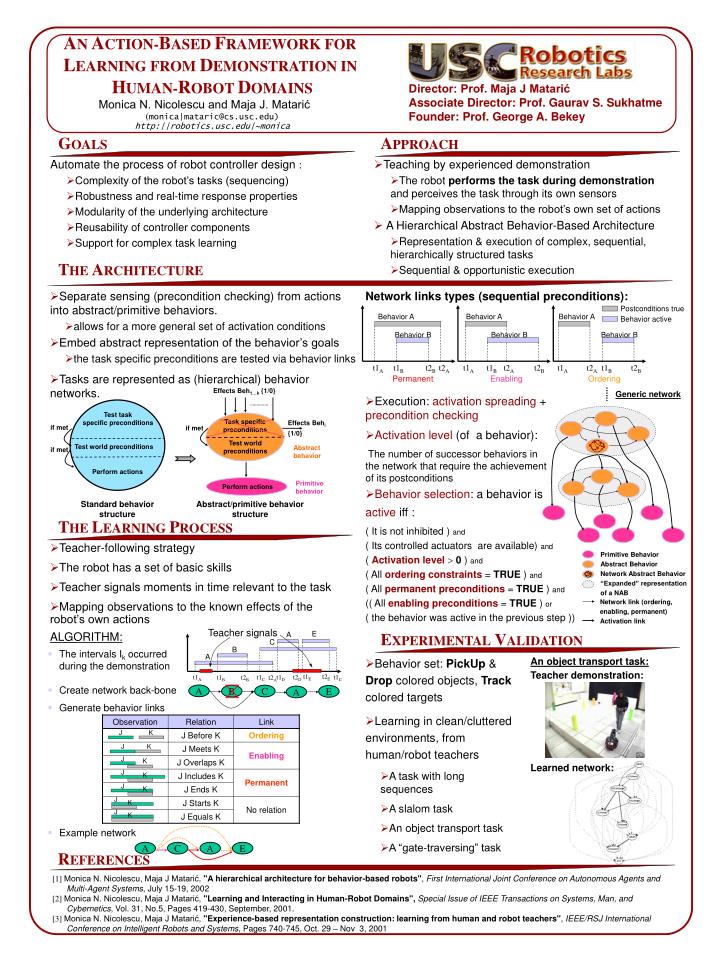
E A C B A t1E t2E t1A t1B t2B t1C t1D t2D t1C t2A Effects Beh1…k {1/0} Test task specific preconditions Effects Behi {1/0} Task specific preconditions if met if met Test world preconditions Test world preconditions Abstract behavior if met Perform actions A C A E Primitive behavior Perform actions Standard behavior structure Abstract/primitive behavior structure Network links types (sequential preconditions): Postconditions true Behavior A Behavior A Behavior A Behavior active Behavior B Behavior B Behavior B t1A t1B t2B t2A t1A t1B t2A t2B t1A t2A t1B t2B Permanent Enabling Ordering Primitive Behavior Abstract Behavior Network Abstract Behavior “Expanded” representation of a NAB Network link (ordering, enabling, permanent) Activation link Observation Relation Link J K J Before K Ordering J K J Meets K Enabling J K J Overlaps K J J Includes K Permanent K J J Ends K K J J Starts K No relation K J K J Equals K AN ACTION-BASED FRAMEWORK FOR LEARNING FROM DEMONSTRATION IN HUMAN-ROBOT DOMAINS Director: Prof. Maja J Matarić Associate Director: Prof. Gaurav S. Sukhatme Founder: Prof. George A. Bekey Monica N. Nicolescu and Maja J. Matarić (monica|mataric@cs.usc.edu) http:||robotics.usc.edu|~monica GOALS APPROACH • Automate the process of robot controller design : • Complexity of the robot’s tasks (sequencing) • Robustness and real-time response properties • Modularity of the underlying architecture • Reusability of controller components • Support for complex task learning • Teaching by experienced demonstration • The robot performs the task during demonstration and perceives the task through its own sensors • Mapping observations to the robot’s own set of actions • A Hierarchical Abstract Behavior-Based Architecture • Representation & execution of complex, sequential, hierarchically structured tasks • Sequential & opportunistic execution THE ARCHITECTURE • Separate sensing (precondition checking) from actions into abstract/primitive behaviors. • allows for a more general set of activation conditions • Embed abstract representation of the behavior’s goals • the task specific preconditions are tested via behavior links • Tasks are represented as (hierarchical) behavior networks. Generic network • Execution: activation spreading + precondition checking • Activation level (of a behavior): The number of successor behaviors in the network that require the achievement of its postconditions • Behavior selection: a behavior is active iff : ( It is not inhibited ) and • ( Its controlled actuators are available) and • ( Activation level 0 ) and • ( Allordering constraints = TRUE ) and • ( All permanent preconditions = TRUE ) and • (( All enabling preconditions = TRUE ) or • ( the behavior was active in the previous step )) THE LEARNING PROCESS • Teacher-following strategy • The robot has a set of basic skills • Teacher signals moments in time relevant to the task • Mapping observations to the known effects of the robot’s own actions Teacher signals EXPERIMENTALVALIDATION ALGORITHM: • The intervals Ik occurred during the demonstration • Behavior set: PickUp & Drop colored objects, Track colored targets • Learning in clean/cluttered environments, from human/robot teachers • A task with long sequences • A slalom task • An object transport task • A “gate-traversing” task An object transport task: Teacher demonstration: • Create network back-bone A C B E A • Generate behavior links Learned network: • Example network REFERENCES [1] Monica N. Nicolescu, Maja J Matarić, "A hierarchical architecture for behavior-based robots", First International Joint Conference on Autonomous Agents and Multi-Agent Systems, July 15-19, 2002 [2] Monica N. Nicolescu, Maja J Matarić, "Learning and Interacting in Human-Robot Domains",Special Issue of IEEE Transactions on Systems, Man, and Cybernetics, Vol. 31, No.5, Pages 419-430, September, 2001. [3] Monica N. Nicolescu, Maja J Matarić, "Experience-based representation construction: learning from human and robot teachers", IEEE/RSJ International Conference on Intelligent Robots and Systems, Pages 740-745, Oct. 29 – Nov 3, 2001