Download
1 / 25
250 likes | 285 Views
Learn the Gaussian Elimination method for solving simultaneous linear equations, including Forward Elimination and Back Substitution steps. Use pivot equations to transform the coefficient matrix into Upper Triangular form. Demonstrated with a Rocket Velocity example.

E N D
Simultaneous Linear Equations Gaussian Elimination
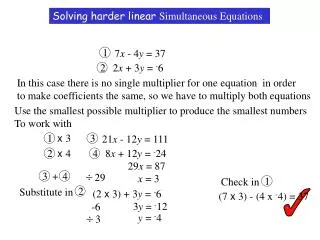
Gaussian Elimination One of the most popular techniques for solving simultaneous linear equations of the form Consists of 2 steps 1. Forward Elimination of Unknowns. 2. Back Substitution
Forward Elimination The goal of Forward Elimination is to transform the coefficient matrix into an Upper Triangular Matrix
Forward Elimination Linear Equations A set of n equations and n unknowns . . . . . .
Forward Elimination Transform to an Upper Triangular Matrix Step 1: Eliminate x1 in 2ndequation using equation 1 as the pivot equation Which will yield
Forward Elimination Pivot = (a(2,1)/a(1,1)) For i=1:var+1 i:all element in the same equation a(2,i) = a(2,i) - (pivot * a(1,i) ) end Zeroing out the coefficient of x1 in the 2nd equation. Subtract this equation from 2nd equation
This procedure is repeated for the remaining equations to reduce the set of equations as For j=1+1:var j: all equations 1: to eleminate x1 Pivot = (a( j,1)/a(1,1)) For i=1:var+1 a( j ,i) = a( j ,i) - (pivot * a(1,i) ) End end . . . . . .
Forward Elimination Step 2: Eliminate x2 in the 3rdequation. Equivalent to eliminating x1 in the 2nd equation using equation 2 as the pivot equation. This procedure is repeated for the remaining equations to reduce the set of equations
Forward Elimination Continue this procedure by using the third equation as the pivot equation and so on. • For nx=1:var-1 xn:all the x in all equations • For j=nx+1:var j: all equations • Pivot = (a( j,nx)/a(nx,nx)) • For i=1:var+1i:all element in the same equation • a( j ,i) = a( j ,i) - (pivot * a(nx,i) ) • End • End • end
At the end of (n-1) Forward Elimination steps, the system of equations will look like: . . . . . .
Forward Elimination At the end of the Forward Elimination steps
Back Substitution The goal of Back Substitution is to solve each of the equations using the upper triangular matrix. Example of a system of 3 equations
Back Substitution Start with the last equation because it has only one unknown Solve the second from last equation using xn solved for previously. This solves for xn-1.
Back Substitution Representing Back Substitution for all equations by formula For i=n-1, n-2,….,1 and
For z= var : -1 : 1 • sum= 0 • For w=z+1 : 1 : var • Sum =sum+(a(z,w)*x(w)) • End • X(z)= (a(z,4)- sum) / a(z,z) • end
Example: Rocket Velocity The upward velocity of a rocket is given at three different times
Example: Rocket Velocity Forward Elimination: Step 1 Yields
Example: Rocket Velocity Forward Elimination: Step 1 Yields
Example: Rocket Velocity Forward Elimination: Step 2 Yields This is now ready for Back Substitution
Example: Rocket Velocity Back Substitution: Solve for a3 using the third equation
Example: Rocket Velocity Back Substitution: Solve for a2 using the second equation
Example: Rocket Velocity Back Substitution:Solve for a1 using the first equation
Example: Rocket Velocity Solution: The solution vector is The polynomial that passes through the three data points is then:
Example: Rocket Velocity Solution: Substitute each value of t to find the corresponding velocity